Устройство и программирование микроконтроллеров AVR. Микроконтроллер и как его победить
Микросхемы разного назначения применяются в составе электроники современной техники. Огромное многообразие такого рода компонентов дополняют микросхемы памяти. Этот вид радиодеталей (среди электронщиков и в народе) зачастую называют просто – чипы. Основное назначение чипов памяти – хранение определённой информации с возможностью внесения (записи), изменения (перезаписи) или полного удаления (стирания) программными средствами. Всеобщий интерес к чипам памяти понятен. Мастерам, знающим как программировать микросхемы памяти, открываются широкие просторы в области ремонта и настройки современных электронных устройств.
Микросхема памяти — это электронный компонент, внутренняя структура которого способна сохранять (запоминать) внесённые программы, какие-либо данные или одновременно то и другое.
По сути, загруженные в чип сведения представляют собой серию команд, состоящих из набора вычислительных единиц микропроцессора.
Следует отметить: чипы памяти всегда являются неотъемлемым дополнением микропроцессоров – управляющих микросхем. В свою очередь микропроцессор является основой электроники любой современной техники.
Набор электронных компонентов на плате современного электронного устройства. Где-то среди этой массы радиодеталей приютился компонент, способный запоминать информацию
Таким образом, микропроцессор управляет , а чип памяти хранит сведения, необходимые микропроцессору.
Программы или данные хранятся в чипе памяти как ряд чисел — нулей и единиц (биты). Один бит может быть представлен логическими нулем (0) либо единицей (1).
В единичном виде обработка битов видится сложной. Поэтому биты объединяются в группы. Шестнадцать бит составляют группу «слов», восемь бит составляют байт — «часть слова», четыре бита — «кусочек слова».
Программным термином для чипов, что используется чаще других, является байт. Это набор из восьми бит, который может принимать от 2 до 8 числовых вариаций, что в общей сложности даёт 256 различных значений.
Для представления байта используется шестнадцатеричная система счисления, где предусматривается использование 16 значений из двух групп:
- Цифровых (от 0 до 9).
- Символьных (от А до F).
Поэтому в комбинациях двух знаков шестнадцатеричной системы также укладываются 256 значений (от 00h до FFh). Конечный символ «h» указывает на принадлежность к шестнадцатеричным числам.
Организация микросхем (чипов) памяти
Для 8-битных чипов памяти (наиболее распространенный тип) биты объединяются в байты (8 бит) и сохраняются под определённым «адресом».
По назначенному адресу открывается доступ к байтам. Вывод восьми битов адреса доступа осуществляется через восемь портов данных.
 Организация структуры запоминающего устройства. На первый взгляд сложный и непонятный алгоритм. Но при желании разобраться, понимание приходит быстро
Организация структуры запоминающего устройства. На первый взгляд сложный и непонятный алгоритм. Но при желании разобраться, понимание приходит быстро
Людей, работающих с программной частью микроконтроллеров, редко причисляют к классическим разработчикам ПО. Всё дело в том, что помимо софтверных знаний, им требуются ещё кое-какие сведения об используемом железе. Многих программистов такие знания не касаются вовсе.
Плюс, разработчик приложений или сайтов всегда подсознательно стремится к триумфу. Создание уникального и популярного продукта является той отметкой, разделяющей карьеру на нормальную и успешную. А создавая программу для микроконтроллера, вы вряд ли будете думать об общественной оценке вашего вклада. Впрочем, давайте по порядку.

Возраст
Начнём с главного: когда уже (ещё) можно начать прокладывать свой путь в профессию? Ответ предсказуем: чем раньше, тем лучше. И изобилие специальных наборов для детей к этому располагает. Даже дело не в том, что с возрастом вам будет сложнее перестраиваться и обучаться этой дисциплине. Просто опыт, как и во многих других IT-профессиях, здесь играет решающее значение.
Но не всё так плохо. Всё же в России этот рынок не очень развит. Начав путь разработчика ПО для МК после 30, вы сможете сделать неплохую карьеру в какой-то одной сфере или конкретном месте деятельности. Если, конечно, не пытаться стать «многостаночником». Всегда бывают исключения, но многое зависит от вашей прошлой деятельности. Наверное, стоит принять во внимание, что даже 10 лет в этой профессии не впечатляют работодателя.
Знания
От пустых слов перейдём к реальным требованиям. «MustKnow» в программировании микроконтроллеров - язык C/C++. Да, мировые тенденции сейчас указывают на переход на более совершенные или хотя бы простые языки ( Arduino или D). Но это будущее довольно отдалённое, закладывать путь в него можно разве что сегодняшним школьникам младших классов.
Кроме того, будет очень полезным знание ассемблера. Это необходимо для пошагового отслеживания исполнения кода, чтобы избежать плавающих ошибок и неоправданных потерь в быстродействии.
В остальном довольно общая компьютерная наука: протоколы передачи, простейшее знание электроники и схемотехники (хотя бы принципы работы АЦП/ЦАП, работать с ключами, питанием и пр.), умение читать (и понимать) техническую документацию на английском языке. Но главное - не работать по принципу “научного тыка”, в противном случае ваши микроконтроллеры рискуют превратиться в “камни”.
Еще один совет: постигать все эти знания необходимо на практике. Начать можно с дешёвых, но эффективных готовых плат со всей необходимой обвязкой, вроде Arduino или Raspberry Pi, которые в будущем наверняка станут для вас хорошими помощниками. А уже потом, если возникнет желание, поиграть с периферией.
Литература
На прошлой неделе, подачи одного из пользователей GeekBrains, я всерьёз задумался над вопросом “Где можно пройти курсы по программированию микроконтроллеров?”, да и вообще о профильной литературе в целом (и это несмотря на профильное высшее образование и около 10 лет опыта работы). Дело не в том, что их не существует (есть и курсы , и книги), просто главный инструмент разработчика ПО для МК - техническая документация, поставляемая вместе с платформой.
Все универсальные книги могут описать отличия, преимущества и недостатки тех или иных микроконтроллеров, на что обратить внимание при написании кода, обучить “красоте” и основным принципам. Но огромный плюс и он же главный недостаток данной профессии - подробная индивидуальная инструкция по работе с каждым более-менее серьёзным контроллером.
Это означает, что абсолютно любой человек может взять, прочитать её и через несколько мгновений организовать стандартное мигание “светодиодами”. Но даже с 50 годами стажа вы не сможете сесть за незнакомый микроконтроллер и, не читая документацию, сделать с ним что-то полезное (придётся, как минимум взглянуть на расположение контактов и их назначение по умолчанию).
IDE
Как и у популярных направлений программирования, здесь также имеются собственные IDE. Каждая крупная компания выпускает собственную среду разработки для своих продуктов. Есть и универсальные решения. Стоит обратить внимание на Keil uVision - это такой универсальный и, пожалуй, наиболее популярный инструмент (хоть и не лучший) на все случаи жизни. Полный перечень можете найти .

Работа
Если вам действительно нравится идея программировать микроконтроллеры, создавая уникальные современные гаджеты, то найти вакансии себе по душе не составит труда. Люди данной профессии востребованы, причём как в стартапах, так и в крупных прогосударственных структурах, в том числе военных.
Финансово трудно придётся новичкам (до 1 года опыта): зарплата в районе 20 тыс. рублей в месяц для программиста МК. Это вполне реальная цифра в регионах. Зато если вы живёте в столице, у вас есть опыт работы с популярным видом МК (от 3 лет активной деятельности) и голова на плечах, то вполне можно рассчитывать и на 150 тыс. рублей в месяц. В целом, не сказать, что конкуренция за места у данных разработчиков высокая, но с течением времени она неизбежно растёт.
Опять же, для людей с опытом есть вариант поискать счастье за границей. Особенно если у вас уже есть опыт полноценной работы. Дело в том, что в России идея IoT пока не слишком развивается. Да и вообще автоматизация пока не затрагивает небольшие системы. А в США, Японии и других развитых странах хороший разработчик ПО для МК - на вес золота. Правда, придётся учитывать иной уровень конкуренции и серьёзные требования по производительности труда.
И кстати
В любом случае, прежде чем осознанно встать на эти рельсы, займитесь программированием МК в качестве хобби. Сделайте “умной” свою комнату или дом, повторите несколько экспериментов из , опубликуйте собственные достижения, посвятите этому делу мозги и душу. И если не возникнет ощущения “колхоза”, то... добро пожаловать в клуб!
Я не раз и не два говорил, что изучение МК надо начинать с ассемблера. Этому был посвящен целый курс на сайте (правда он не очень последовательный, но постепенно я его причесываю до адекватного вида) . Да, это сложно, результат будет не в первый день, но зато ты научишься понимать что происходит у тебя в контроллере. Будешь знать как это работает, а не по обезьяньий копировать чужие исходники и пытаться понять почему оно вдруг перестало работать. Кроме того, Си намного проще натворить быдлокода, который вылезет вилами в самый неподходящий момент.
К сожалению все хотят результат немедленно. Поэтому я решил пойти с другой стороны — сделать обучалку по Си, но с показом его нижнего белья. Хороший программист-эмбеддер всегда крепко держит свою железку за шкварник, не давая ей ни шагу ступить без разрешения. Так что будет вначале Си код, потом то что родил компилятор и как все это работает на самом деле:)
С другой стороны у Си сильная сторона это переносимость кода. Если, конечно, писать все правильно. Разделяя алгоритмы работы и их железные реализации в разные части проекта. Тогда для переноса алгоритма в другой МК достаточно будет переписать только интерфейсный слой, где прописано все обращение к железу, а весь рабочий код оставить как есть. И, конечно же, читаемость. Сишный исходник проще понять с первого взгляда (хотя.. мне, например, уже пофигу на что фтыкать — хоть си, хоть асм:)), но, опять же, если правильно все написать. Этим моментам я тоже буду уделять внимание.
В качестве подопытной железки на которой будет ставиться львинная доля всех примеров будет моя отладочная плата .
Первая программа на Си для AVR
Выбор компилятора и установка среды
Для AVR существует множество разных компиляторов Си:
В первую очередь это IAR AVR C
— почти однозначно признается лучшим компилятором для AVR, т.к. сам контроллер создавался тесном сотрудничистве Atmel и спецов из IAR. Но за все приходится платить. И этот компилятор мало того, что является дорогущим коммерческим софтом, так еще обладает такой прорвой настроек, что просто взять и скомпилить в нем это надо постраться. У меня с ним правда не срослось дружбы, проект загнивал на странных ошибках на этапе линковки (позже выяснил, что это был кривой кряк).
Вторым идет WinAVR GCC — мощный оптимизирующий компилятор. Полный опенсорц, кроссплатформенный, в общем, все радости жизни. Еще он отлично интегрируется в AVR Studio позволяя вести отладку прямо там, что адски удобно. В общем, я выбрал его.
Также есть CodeVision AVR C
— очень популярный компилятор. Стал популярен в связи со своей простотой. Рабочую программу в нем получить можно уже через несколько минут — мастер стартового кода этом сильно способствует, штампуя стандартыне инициализации всяких уартов. Честно говоря, я как то с подозрением к нему отношусь — как то раз приходилось дизасмить прогу написаную этим компилером, каша какая то а не код получалась. Жуткое количество ненужных телодвижений и операций, что выливалось в неслабый обьем кода и медленное быстродействие. Впрочем, возможно тут была ошибка в ДНК писавшего исходную прошивку. Плюс он хочет денег. Не так много как IAR, но ощутимо. А в деморежиме дает писать не более чем 2кб кода.
Кряк конечно есть, но если уж воровать, так миллион, в смысле IAR:)
Еще есть Image Craft AVR C и MicroC от микроэлектроники. Ни тем ни другим пользоваться не приходилось, но вот SWG очень уж нахваливает MicroPascal , мол жутко удобная среда программирования и библиотеки. Думаю MicroC не хуже будет, но тоже платный.
Как я уже сказал, я выбра WinAVR по трем причинам: халявный, интегрируется в AVR Studio и под него написана просто прорва готового кода на все случаи жизни.
Так что качай себе инсталяху WinAVR с и AVR Studio. Далее вначале ставится студия, потом, сверху, накатывается WinAVR и цепляется к студии в виде плагина. Настоятельно рекомендую ставить WinAVR по короткому пути, что то вроде C:\WinAVR тем самым ты избежишь кучи проблем с путями.
Cоздание проекта
Итак, студия поставлена, Си прикручен, пора бы и попробовать что нибудь запрограммировать. Начнем с простого, самого простого. Запускай студию, выбирай там новый проект, в качестве компилятора AVR GCC и вписывай название проекта.
Открывается рабочее поле с пустым *.c файлом.
Теперь не помешает настроить отображение путей в закладках студии. Для этого слазь по адресу:
Меню Tools — Options — General — FileTabs и выбираем в выпадающем списке «Filename Only». Иначе работать будет невозможно — на вкладке будет полный путь файла и на экране будет не более двух трех вкладок.
Настройка проекта
Вообще, классическим считается создание make файла в котором бы были описаны все зависимости. И это, наверное, правильно. Но мне, выросшему на полностью интегрированных IDE вроде uVision
или AVR Studio
этот подход является глубоко чуждым. Поэтому буду делать по своему, все средствами студии.
Тыкай в кнопку с шестеренкой.
 |
Это настройки твоего проекта, а точнее настройки автоматической генерации make файла. На первой странице надо всего лишь вписать частоту на которой будет работать твой МК. Это зависит от фьюз битов, так что считаем что частота у нас 8000000Гц.
Также обрати внимание на строку оптимизации. Сейчас там стоит -Os это оптимизация по размеру. Пока оставь как есть, потом можешь попробовать поиграться с этим параметром. -O0 это отстутсвие оптимизации вообще.
Следующим шагом будет настройка путей. Первым делом добавь туда директорию твоего проекта — будешь туда подкладывать сторонние библиотеки. В списке появится путь «.\»
Make файл сгенерирован, его ты можешь поглядеть в папке default в своем проекте, просто пробегись глазами, посмотри что там есть.
 |
На этом пока все. Жми везде ОК и переходи в исходник.
Постановка задачи
Чистый лист так и подмывает воплотить какую нибудь хитрую задумку, так как банальное мигание диодом уже не вставляет. Давай уж сразу брать быка за рога и реализуем связь с компом — это первым делом что я делаю.
Работать будет так:
При приходе по COM порту единички (код 0х31) будем зажигать диодик, а при приходе нуля (код 0х30) гасить. Причем сделано будет все на прерываниях, а фоновой задачей будет мигание другого диода. Простенько и со смыслом.
Собираем схему
Нам надо соединить модуль USB-USART конвертера с выводами USART микроконтроллера. Для этого берем перемычку из двух проводков и накидывам на штырьки крест накрест. То есть Rx контроллера соединяем с Tx конвертера, а Tx конвертера с Rx контроллера.
Получится, в итоге вот такая схема:
 |
Подключение остальных выводов, питания, сброса не рассматриваю, оно стандартное
Пишем код
Сразу оговорюсь, что я не буду углубляться конкретно в описание самого языка Си. Для этого существует просто колоссальное количество материала, начиная от классики «Язык программирования Си» от K&R и заканчивая разными методичками.
Одна такая метода нашлась у меня в загашнике, я когда то именно по ней изучал этот язык. Там все кратко, понятно и по делу. Я ее постепенно верстаю и перестаскиваю на свой сайт.
Там правда еще не все главы перенесены, но, думаю, это ненадолго.
Вряд ли я опишу лучше, поэтому из учебного курса, вместо подробного разьяснения сишных тонкостей, я буду просто давать прямые линки на отдельные страницы этой методички.
Добавляем библиотеки.
Первым делом мы добавляем нужные библиотеки и заголовки с определениями. Ведь Си это универсальный язык и ему надо обьяснить что мы работаем именно с AVR, так что вписывай в исходник строку:
| 1 | #include |
#include
Этот файл находится в папке WinAVR и в нем содержится описание всех регистров и портов контроллера. Причем там все хитро, с привязкой к конкретному контроллеру, который передается компилятором через make файл в параметре MCU и на основании этой переменной в твой проект подключается заголовочный файл с описанием адресов всех портов и регистров именно на этот контроллер. Во как! Без него тоже можно, но тогда ты не сможешь использовать символические имена регистров вроде SREG или UDR и придется помнить адрес каждого вроде «0xC1», а это голову сломать.
Сама же команда #include <имя файла> позволяет добавить в твой проект содержимое любого текстового файла, например, файл с описанием функций или кусок другого кода. А чтобы директива могла этот файл найти мы и указывали пути к нашему проекту (директория WinAVR там уже по дефолту прописана).
Главная функция.
Программа на языке Си вся состоит из функций. Они могут быть вложенными и вызываться друг из друга в любом порядке и разными способами. Каждая функция имеет три обязательных параметра:
- Возвращаемое значение, например, sin(x) возвращает значение синуса икс. Как в математике, короче.
- Передаваемые параметры, тот самый икс.
- Тело функции.
Все значения передаваемые и возвращаемые обязаны быть какого либо типа, в зависимости от данных.
Любая программа на Си должна содержать функцию main как точку входа в главную прогрмму, иначе это нифига не Си:). По наличию main в чужом исходнике из миллиона файлов можно понять, что это и есть головная часть программы откуда начинается все. Вот и зададим:
| 1 2 3 4 5 | int main(void ) { return 0 ; } |
int main(void) { return 0; }
Все, первая простейшая программа написана, не беда что она ничего не делает, мы же только начали.
Разберем что же мы сделали.
int
это тип данных которая функция main возвращает.
Конечно, в микроконтроллере main ничего вернуть в принципе не может и по идее должна быть void main(void) , но GCC изначально заточен на PC и там программа может вернуть значение операционной системе по завершении. Поэтому GCC на void main(void) ругается Warning’ом.
Это не ошибка, работать будет, но я не люблю варнинги.
void это тип данных которые мы передаем в функцию, в данном случае main также не может ничего принять извне, поэтом void — пустышка. Заглушка, применяется тогда когда не надо ничего передавать или возвращать.
Вот такие вот { } фигурные скобочки это программный блок, в данном случае тело функции main , там будет распологаться код.
return
— это возвращаемое значение, которое функция main отдаст при завершении, поскольку у нас int, то есть число то вернуть мы должны число. Хотя это все равно не имеет смысла, т.к. на микроконтроллере из main нам выходить разве что в никуда. Я возвращаю нуль. Ибо нефиг. А компилятор обычно умный и на этот случай код не генерит.
Хотя, если извратиться, то из main
на МК выйти можно — например вывалиться в секцию бутлоадера и исполнить ее, но тут уже потребуется низкоуровневое ковыряние прошивки, чтобы подправить адреса перехода. Ниже ты сам увидишь и поймешь как это сделать. Зачем? Вот это уже другой вопрос, в 99.999% случаев это нафиг не надо:)
Сделали, поехали дальше. Добавим переменную, она нам не особо нужна и без нужны вводить переменные не стоит, но мы же учимся. Если переменные добавляются внутри тела функции — то они локальные и существуют только в этой функции. Когда из функции выходишь эти переменные удаляются, а память ОЗУ отдается под более важные нужды. .
| 1 2 3 4 5 6 | int main(void ) { unsigned char i; return 0 ; } |
int main(void) { unsigned char i; return 0; }
unsigned
значит беззнаковый. Дело в том, что в двоичном представлении у нас старший бит отводится под знак, а значит в один байт (char) влазит число +127/-128, но если знак отбросить то влезет уже от 0 до 255. Обычно знак не нужен. Так что unsigned
.
i
— это всего лишь имя переменной. Не более того.
Теперь надо проинициализировать порты и UART . Конечно, можно взять и подключить библиотеку и вызвать какой нибудь UartInit(9600); но тогда ты не узнаешь что же произошло на самом деле.
Делаем так:
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 | int main(void ) { unsigned char i; #define XTAL 8000000L #define baudrate 9600L #define bauddivider (XTAL/(16*baudrate)-1) #define HI(x) ((x)>>8) #define LO(x) ((x)& 0xFF) UBRRL = LO(bauddivider) ; UBRRH = HI(bauddivider) ; UCSRA = 0 ; UCSRB = 1 << RXEN| 1 << TXEN| 1 << RXCIE| 0 << TXCIE; UCSRC = 1 << URSEL| 1 << UCSZ0| 1 << UCSZ1; } |
int main(void)
{
unsigned char i;
#define XTAL 8000000L
#define baudrate 9600L
#define bauddivider (XTAL/(16*baudrate)-1)
#define HI(x) ((x)>>8)
#define LO(x) ((x)& 0xFF)
UBRRL = LO(bauddivider);
UBRRH = HI(bauddivider);
UCSRA = 0;
UCSRB = 1< Страшна? На самом деле реалного кода тут всего пять последних строк. Все что #define
это макроязык препроцессора. Почти та же ботва, что и в Ассемблере, но синтаксис несколько иной. Они облегчат твои рутинные операции по вычислении нужных коэффициентов. В первой строке мы говорим что вместо XTAL
можно смело подставлять 8000000, а L
— указание типа, мол long — это тактовая частота процессора. То же самое baudrate
— частота передачи данных по UART. bauddivider
уже сложней, вместо него будет подставлятся выражение вычисленное по формуле из двух предыдущих. Так что все что сделано как #define
можно смело выкинуть, а нужные числа подсчитать на калькуляторе и сразу же вписать их в строки UBBRL = …. и UBBRH = ….. Можно. Но! Делать этого КАТЕГОРИЧЕСКИ НЕЛЬЗЯ
! Работать будет и так и эдак, но у тебя в программе появятся так называемые магические числа
— значения взятые непонятно откуда и непонятно зачем и если ты через пару лет откроешь такой проект то понять что это за значения будет чертовски трудно. Да и сейчас, захочешь ты изменить скорость, или поменяешь частоту кварца и все придется пересчитывать заново, а так поменял пару циферок в коде и все само. В общем, если не хочешь прослыть быдлокодером, то делай код таким, чтобы он легко читался, был понятен и легко модифицировался. Дальше все просто:
Запись вида 1< Готово, пора бы посмотреть что получилось. Жми на компиляцию и запуск эмуляции (Ctrl+F7). Отладка
Дело в том, что изначально, на самом деле, она стояла на строке UBRRL = LO(bauddivider); Ведь то что у нас в define это не код, а просто предварительные вычисления, вот симулятор немного и затупил. Но теперь он осознал, первая инструкция выполнена и если ты залезешь в дерево I/O View
, в раздел USART и поглядишь там на байт UBBRL то увидишь, что там значение то уже есть! 0х33. Сделай еще один шаг. Погляди как изменится содержимое другого регистра. Так прошагай их все, обрати внимание на то, что все указаные биты выставляются как я тебе и говорил, причем выставляются одновременно для всего байта. Дальше Return дело не пойдет — программа кончилась. Вскрытие
Вначале будет ботва из серии: 00000000: 940C002A JMP 0x0000002A Jump
+00000002: 940C0034 JMP 0x00000034 Jump
+00000004: 940C0034 JMP 0x00000034 Jump
+00000006: 940C0034 JMP 0x00000034 Jump
+00000008: 940C0034 JMP 0x00000034 Jump
+0000000A: 940C0034 JMP 0x00000034 Jump
+0000000C: 940C0034 JMP 0x00000034 Jump
+0000000E: 940C0034 JMP 0x00000034 Jump
+00000010: 940C0034 JMP 0x00000034 Jump
+00000012: 940C0034 JMP 0x00000034 Jump
+00000014: 940C0034 JMP 0x00000034 Jump
+00000016: 940C0034 JMP 0x00000034 Jump
+00000018: 940C0034 JMP 0x00000034 Jump
+0000001A: 940C0034 JMP 0x00000034 Jump
+0000001C: 940C0034 JMP 0x00000034 Jump
+0000001E: 940C0034 JMP 0x00000034 Jump
+00000020: 940C0034 JMP 0x00000034 Jump
+00000022: 940C0034 JMP 0x00000034 Jump
+00000024: 940C0034 JMP 0x00000034 Jump
+00000026: 940C0034 JMP 0x00000034 Jump
+00000028: 940C0034 JMP 0x00000034 Jump Это таблица векторов прерываний. К ней мы еще вернемся, пока же просто посмотри и запомни, что она есть. Первая колонка — адрес ячейки флеша в которой лежит команда, вторая код команды третья мнемоника команды, та самая ассемблерная инструкция, третья операнды команды. Ну и автоматический коммент. 0000002B: BE1F OUT 0x3F,R1 Out to I/O location Запись этого нуля по адресу 0x3F, Если ты поглядишь в колонку I/O view, то ты увидишь что адрес 0x3F это адрес регистра SREG — флагового регистра контроллера. Т.е. мы обнуляем SREG, чтобы запустить программу на нулевых условиях. 0000002C: E5CF LDI R28,0x5F Load immediate
+0000002D: E0D4 LDI R29,0x04 Load immediate
+0000002E: BFDE OUT 0x3E,R29 Out to I/O location
+0000002F: BFCD OUT 0x3D,R28 Out to I/O location Это загрузка указателя стека. Напрямую грузить в I/O регистры нельзя, только через промежуточный регистр. Поэтому сначала LDI в промежуточный, а потом оттуда OUT в I/O. О стеке я тоже еще расскажу подробней. Пока же знай, что это такая динамическая область памяти, висит в конце ОЗУ и хранит в себе адреса и промежуточные переменные. Вот сейчас мы указали на то, откуда у нас будет начинаться стек. 00000032: 940C0041 JMP 0x00000041 Jump Прыжок в сааааамый конец программы, а там у нас запрет прерываний и зацикливание наглухо само на себя: 00000041: 94F8 CLI Global Interrupt Disable
+00000042: CFFF RJMP PC-0x0000 Relative jump Это на случай непредвиденых обстоятельств, например выхода из функции main. Из такого зацикливания контроллер можно вывести либо аппаратным сбросом, либо, что вероятней, сбросом от сторожевой собаки — watchdog. Ну или, как я говорил выше, подправить это мест в хекс редакторе и ускакать куда нам душе угодно. Также обрати внимание на то, что бывает два типа переходов JMP и RJMP первый это прямой переход по адресу. Он занимает четыре байта и может сделать прямой переход по всей области памяти. Второй тип перехода — RJMP — относительный. Его команда занимает два байта, но переход он делает от текущего положения (адреса) на 1024 шага вперед или назад. И в его параметрах указывается смещение от текущей точки. Используется чаще, т.к. занимает в два раза меньше места во флеше, а длинные прееходы нужны редко. 00000034: 940C0000 JMP 0x00000000 Jump А это прыжок в самое начало кода. Перезагрузка своего рода. Можешь проверить, все вектора прыгают сюда. Из этого вывод — если ты сейчас разрешишь прерывания (они по дефолту запрещены) и у тебя прерывание пройзойдет, а обработчика нет, то будет программный сброс — программу кинет в самое начало. Функция main. Все аналогично, даже можно и не описывать. Посмотри только что в регистры заносится уже вычисленное число. Препроцессор компилятора рулит!!! Так что никаких «магических» чисел! 00000036: E383 LDI R24,0x33 Load immediate
+00000037: B989 OUT 0x09,R24 Out to I/O location
15: UBRRH = HI(bauddivider);
+00000038: BC10 OUT 0x20,R1 Out to I/O location
16: UCSRA = 0;
+00000039: B81B OUT 0x0B,R1 Out to I/O location
17: UCSRB = 1< А вот тут косяк: 0000003E: E080 LDI R24,0x00 Load immediate
+0000003F: E090 LDI R25,0x00 Load immediate
+00000040: 9508 RET Subroutine return Спрашивается, для чего это компилятор добавляет такую ботву? А это не что иное, как Return 0, функцию то мы определили как int main(void) вот и просрали еще целых четыре байта не пойми на что:) А если сделать void main(void) то останется только RET, но появится варнинг, что мол у нас функция main ничего не возвращает. В общем, поступай как хошь:) Сложно? Вроде бы нет. Пощелкай пошаговое исполнение в режиме дизассемблера и позырь как процессор выполняет отдельные инструкции, что при этом происходит с регистрами. Как происходит перемещение по командам и итоговое зацикливание. Продолжение следует через пару дней … Offtop:
Теперь, когда мы уже ознакомлены с некоторыми возможностями и функциями микроконтроллеров, естественно, возникает логичный вопрос: что нужно для программирования микроконтроллеров? Какие необходимы программы и устройства, где их взять?
Для того чтобы микроконтроллер мог решать задачи и выполнять определенные функции, его нужно запрограммировать, т. е. записать в него программу или же код программы.
Первым делом, прежде чем приступить к написанию любой программы, а точнее кода программы, следует четко представлять, какие функции будет выполнять микроконтроллер. Поэтому сначала нужно определить конечную цель программы. Когда она определена и полностью понятна, тогда составляется алгоритм работы программы. Алгоритм – это последовательность выполнения команд. Применение алгоритмов позволяет более четко структурировать процесс написания кода, а при написании сложных программ часто позволяет сократить время, затрачиваемое на их разработку и отладку.
Следующим этапом после составления алгоритма является непосредственное написание кода программы. Программы для микроконтроллеров пишутся на языке Си
или Ассемблере
. Только Ассемблер больше относится к набору инструкций, нежели к языку программирования и является языком низкого уровня.
Мы будем писать программы на Си, который относится к языку высокого уровня. Программы на Си пишутся гораздо быстрее по сравнению с аналогичными на Ассемблере. К тому же все сложные программы пишутся преимущественно на Си.
Здесь мы не будем сравнивать преимущества и недостатки написания программ на Ассемблере и Си. Со временем, приобретя некоторый опыт в программировании МК, вы сами для себя сделаете полезные выводы.
Сам код программы можно писать в любом стандартном текстовом редакторе, например в Блокноте. Однако на практике пользуются более удобными редакторами, о которых будет сказано далее.
Написанный нами код на Си еще вовсе не понятен микроконтроллеру, поскольку МК понимает команды только в двоичной (или шестнадцатеричной) системе, которая представляет собой набор нулей и единиц. Поэтому Си-шный код нужно преобразовать в нули и единицы. Для этого применяется специальная программа, называемая компилятор
, а сам процесс преобразования кода называется компиляция
.
Для прошивки МК применяется устройство, называемое программатор
. В зависимости от типа программатора вход его подключается к COM или USB порту, а выход к определенным выводам микроконтроллера.
Существует широкий выбор программаторов и отладочных плат, однако нас вполне устроит самый простой программатор
, который в Китае стоит не более 3 $.
После того, как микроконтроллер прошит, выполняется отладка и тестирование программы на реальном устройстве или, как еще говорят, на «железе».
Теперь давайте подытожим этапы программирования микроконтроллеров.
При написании простых программ можно обойтись без второго пункта, т. е. без составления алгоритма на бумаге, его достаточно держать в голове.
Следует заметить, что отладку и тестирование программы также выполняют до прошивки МК.
Существует множество полезных и удобных программ для программирования МК. Они бывают как платные, так и бесплатные. Среди них можно выделить три основных:
1) Atmel Studio
2) CodeVisionAVR
3) WinAVR
Все эти программы относятся к IDE
– I
ntegrated D
evelopment E
nvironment – интегрированная среда разработки
. В них можно писать код, компилировать и отлаживать его.
Следует обратить внимание на Code Vision AVR. Эта IDE позволяет упростить и ускорить написание кода. Однако программа платная.
На начальном этапе программирования все программы лучше прописывать вручную, без каких-либо упрощений. Это поможет быстро приобрести необходимые навыки, а в дальнейшем хорошо понимать и редактировать под свои нужды коды, написанные кем-то другим. Поэтому я рекомендую использовать программу Atmel Studio. Во-первых, она абсолютно бесплатна и постоянно обновляется, а во-вторых она разработана компанией, изготавливающей микроконтроллеры на которых мы будем учиться программировать.
Прошивать микроконтроллеры мы будем с помощью дополнительной программы
.
Если микроконтроллера в наличии нет, то его работу можно эмитировать с помощью программы . Она значительно упрощает процесс отладки программы даже при наличии МК, чтобы его часто не перепрошивать, ведь любой МК имеет конечное число перезаписей, хотя это число и достаточно большое.
При прошивке и отладке МК его удобно располагать на макетной плате, но это вовсе не обязательно. Поэтому для большего удобства пригодится и макетная плата. Существует большой выбор макетных плат, однако я вам рекомендую брать ту, которая имеет по возможности большее число отверстий. Когда мы начнем подключать семисегментные индикаторы, вы оцените преимущества «больших» макетных плат.
#include #include #include
Ну, а LO
и HI
из этого результата возьмут младший и старший байты, т.к. в один байт оно явно может не влезть. В HI
делается сдвиг икса (входной параметр макроса) восемь раз в вправо, в результате от него останется только старший байт. А в LO
мы делаем побитовое И с числом 00FF, в результате останется только младший байт.
Все эти «UBRRL и Со» это регистры конфигурации UART передатчика с помощью которого мы будем общаться с миром. И сейчас мы присвоили им нужные значения, настроив на нужную скорость и нужный режим.
Пробежали всякие прогресс бары, студия переменилась и возле входа в функцию main появилась желтая стрелочка. Это то где процессор в текущий момент, а симуляция на паузе.
Теперь сбрось симуляцию в ноль. Нажми там Reset (Shift+F5)
. Открывай дизассемблированный листинг, сейчас ты увидишь что происходит в контроллере в самом деле. View -> Disassembler
. И не ЫЫАААА!!! Ассемблер!!! УЖОС!!! А НАДО. Чтобы потом, когда что то пойдет не так, не тупил в код и не задавал ламерских вопросах на форумах, а сразу же лез в потроха и смотрел где у тебя затык. Ничего там страшного нет. 1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
+00000000: 940C002A JMP 0x0000002A Jump
+00000002: 940C0034 JMP 0x00000034 Jump
+00000004: 940C0034 JMP 0x00000034 Jump
+00000006: 940C0034 JMP 0x00000034 Jump
+00000008: 940C0034 JMP 0x00000034 Jump
+0000000A: 940C0034 JMP 0x00000034 Jump
+0000000C: 940C0034 JMP 0x00000034 Jump
+0000000E: 940C0034 JMP 0x00000034 Jump
+00000010: 940C0034 JMP 0x00000034 Jump
+00000012: 940C0034 JMP 0x00000034 Jump
+00000014: 940C0034 JMP 0x00000034 Jump
+00000016: 940C0034 JMP 0x00000034 Jump
+00000018: 940C0034 JMP 0x00000034 Jump
+0000001A: 940C0034 JMP 0x00000034 Jump
+0000001C: 940C0034 JMP 0x00000034 Jump
+0000001E: 940C0034 JMP 0x00000034 Jump
+00000020: 940C0034 JMP 0x00000034 Jump
+00000022: 940C0034 JMP 0x00000034 Jump
+00000024: 940C0034 JMP 0x00000034 Jump
+00000026: 940C0034 JMP 0x00000034 Jump
+00000028: 940C0034 JMP 0x00000034 Jump
Так вот, если ты посмотришь, то тут сплошные переходы. А код команды JMP четырех байтный, в нем содержится адрес перехода, записанный задом наперед — младший байт по младшему адресу и код команды перехода 940C 1
2
3
4
+0000002C: E5CF LDI R28,0x5F Load immediate
+0000002D: E0D4 LDI R29,0x04 Load immediate
+0000002E: BFDE OUT 0x3E,R29 Out to I/O location
+0000002F: BFCD OUT 0x3D,R28 Out to I/O location
1
2
+00000041: 94F8 CLI Global Interrupt Disable
+00000042: CFFF RJMP PC-0x0000 Relative jump
1
+00000034: 940C0000 JMP 0x00000000 Jump
1
2
3
4
5
6
7
8
9
10
11
12
< 1
2
3
+0000003E: E080 LDI R24,0x00 Load immediate
+0000003F: E090 LDI R25,0x00 Load immediate
+00000040: 9508 RET Subroutine return
Alexei78
сварганил плагинчик для файрфокса облегчающий навигацию по моему сайту и форуму.
Обсуждение и скачивание, Структура и порядок написания программы

Компиляция программы



Необходимый набор программ
Прошивка и отладка программы
В этом учебном курсе по avr я постарался описать все самое основное для начинающих программировать микроконтроллеры avr
. Все примеры построены на микроконтроллере atmega8
. Это значит, что для повторения всех уроков вам понадобится всего один МК. В качестве эмулятора электронных схем используется Proteus - на мой взгляд, - лучший вариант для начинающих. Программы во всех примерах написаны на компиляторе C для avr CodeVision AVR. Почему не на каком-нибудь ассемблере? Потому что начинающий и так загружен информацией, а программа, которая умножает два числа, на ассемблере занимает около ста строк, да и в сложных жирных проектах используют С. Компилятор CodeVision AVR заточен под микроконтроллеры atmel, имеет удобный генератор кода, неплохой интерфейс и прямо с него можно прошить микроконтроллер.
В этом учебном курсе будет рассказано и показано на простых примерах как:
Для того, чтобы сделать первые шаги на пути программирования МК, вам потребуются всего две программы:
После установки Proteus, запускаем его Он нам предлагает посмотреть проекты которые идут с ним, мы вежливо отказываемся. Теперь давайте создадим в ней самую простую схему. Для этого кликнем на значок визуально ничего не происходит. Теперь нужно нажать на маленькую букву Р (выбрать из библиотеки)
в панели списка компонентов, откроется окно выбора компонентов
Он нам предлагает посмотреть проекты которые идут с ним, мы вежливо отказываемся. Теперь давайте создадим в ней самую простую схему. Для этого кликнем на значок визуально ничего не происходит. Теперь нужно нажать на маленькую букву Р (выбрать из библиотеки)
в панели списка компонентов, откроется окно выбора компонентов  в поле маска вводим название компонента, который мы хотим найти в библиотеке. Например, нам нужно добавить микроконтроллер mega8
в поле маска вводим название компонента, который мы хотим найти в библиотеке. Например, нам нужно добавить микроконтроллер mega8 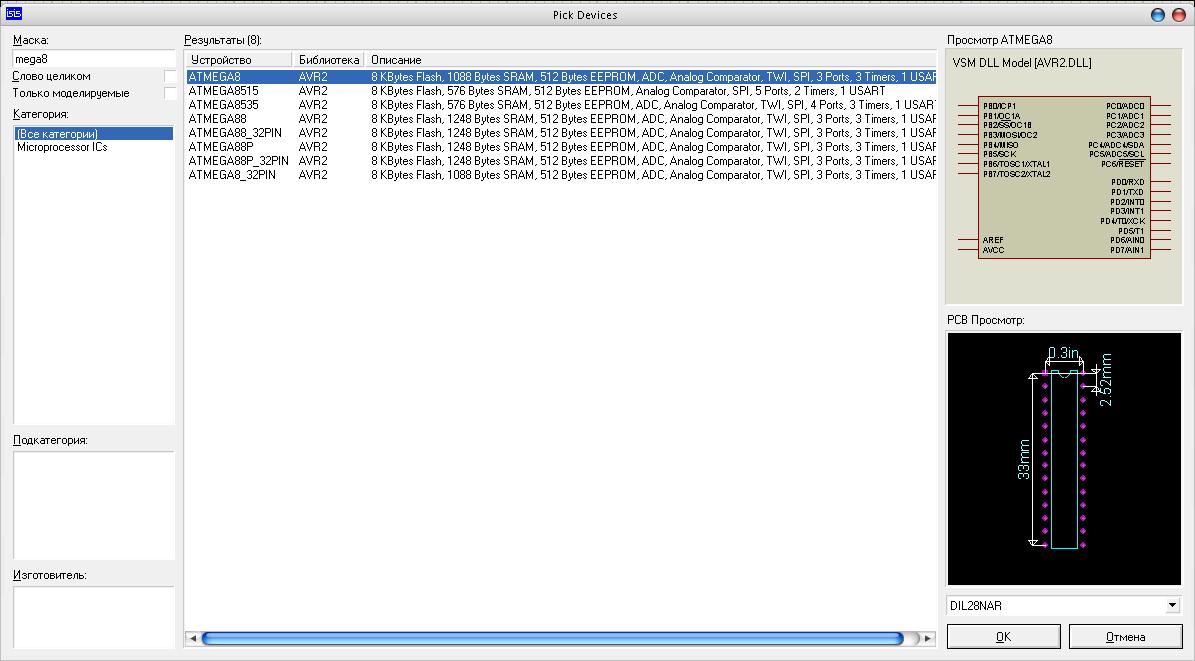 в списке результатов тыкаем на mega8 и нажимаем кнопку ОК
. У нас в списке компонентов появляется микроконтроллер mega8
в списке результатов тыкаем на mega8 и нажимаем кнопку ОК
. У нас в списке компонентов появляется микроконтроллер mega8 Таким образом добавляем в список компонентов еще резистор, введя в поле маска слово res
и светодиод led
Таким образом добавляем в список компонентов еще резистор, введя в поле маска слово res
и светодиод led

 Чтобы разместить детали на схеме, кликаем на деталь, далее кликаем по полю схемы, выбираем место расположения компонента и еще раз кликаем. Для добавления земли или общего минуса на схему слева кликаем "Терминал" и выбираем Ground. Таким образом, добавив все компоненты и соединив их, получаем вот такую простенькую схемку
Чтобы разместить детали на схеме, кликаем на деталь, далее кликаем по полю схемы, выбираем место расположения компонента и еще раз кликаем. Для добавления земли или общего минуса на схему слева кликаем "Терминал" и выбираем Ground. Таким образом, добавив все компоненты и соединив их, получаем вот такую простенькую схемку
 Все, теперь наша первая схема готова! Но вы, наверное, спросите, а что она может делать? А ничего. Ничего, потому что для того, чтобы микроконтроллер заработал, для него нужно написать программу. Программа - это список команд, которые будет выполнять микроконтроллер. Нам нужно, чтобы микроконтроллер устанавливал на ножке PC0
логический 0 (0 вольт) и логическую 1 (5 вольт).
Все, теперь наша первая схема готова! Но вы, наверное, спросите, а что она может делать? А ничего. Ничего, потому что для того, чтобы микроконтроллер заработал, для него нужно написать программу. Программа - это список команд, которые будет выполнять микроконтроллер. Нам нужно, чтобы микроконтроллер устанавливал на ножке PC0
логический 0 (0 вольт) и логическую 1 (5 вольт).
Написание программы для микроконтроллера
Программу мы будем писать на языке С в компиляторе CodeVisionAVR. После запуска CV, он спрашивает нас, что мы хотим создать: Source или Project
 Мы выбираем последнее и нажимаем кнопку ОК. Далее нам будет предложено запустить мастер CVAVR CodeWizard (это бесценный инструмент для начинающего, потому как в нем можно генерировать основной скелет программы)
Мы выбираем последнее и нажимаем кнопку ОК. Далее нам будет предложено запустить мастер CVAVR CodeWizard (это бесценный инструмент для начинающего, потому как в нем можно генерировать основной скелет программы)  выбираем Yes
выбираем Yes
 Мастер запускается с активной вкладкой Chip, здесь мы можем выбрать модель нашего МК - это mega8, и частоту, на которой будет работать МК (по умолчанию mega8 выставлена на частоту 1 мегагерц), поэтому выставляем все, как показано на скриншоте выше.
Переходим во вкладку Ports
Мастер запускается с активной вкладкой Chip, здесь мы можем выбрать модель нашего МК - это mega8, и частоту, на которой будет работать МК (по умолчанию mega8 выставлена на частоту 1 мегагерц), поэтому выставляем все, как показано на скриншоте выше.
Переходим во вкладку Ports
 У микроконтроллера atmega8 3 порта: Port C, Port D, Port B. У каждого порта 8 ножек. Ножки портов могут находиться в двух состояниях:
У микроконтроллера atmega8 3 порта: Port C, Port D, Port B. У каждого порта 8 ножек. Ножки портов могут находиться в двух состояниях:
С помощью регистра DDRx.y мы можем устанавливать ножку входом или выходом. Если в
Когда ножка сконфигурирована как выход, мы можем выставлять на ней лог 1 (+5 вольт) и логический 0 (0 вольт). Это делается записью в регистр PORTx.y. Далее будет подробно рассказано про порты ввода-вывода. А сейчас выставляем все, как показано на скриншоте, и кликаем File->Generate, Save and Exit. Дальше CodeWizard предложит нам сохранить проект, мы его сохраняем и смотрим на код:
Здесь вам может показаться все страшным и незнакомым, но на самом деле все не так. Код можно упростить, выкинув инициализацию неиспользуемых нами периферийных устройств МК. После упрощения он выглядит так:
Всё хорошо. Но для того, чтобы светодиод замигал, нам нужно менять логический уровень на ножке PC0. Для этого в главный цикл нужно добавить несколько строк:
Все, теперь код готов. Кликаем на пиктограму Build all Project files, чтобы скомпилировать (перевести в инструкции процессора МК) нашу программу. В папке Exe, которая находится в нашем проекте, должен появиться файл с расширением hex, это и есть наш файл прошивки для МК. Для того, чтобы нашу прошивку скормить виртуальному микроконтроллеру в Proteus, нужно два раза кликнуть на изображении микроконтроллера в протеусе. Появится вот такое окошко
 кликаем на пиктограму папки в поле Program File, выбераем hex - файл нашей прошивки и нажимаем кнопку ОК.
Теперь можно запустить симуляцию нашей схемы. Для этого нажимаем кнопку "Воспроизвести" в нижнем левом углу окна Протеус.
кликаем на пиктограму папки в поле Program File, выбераем hex - файл нашей прошивки и нажимаем кнопку ОК.
Теперь можно запустить симуляцию нашей схемы. Для этого нажимаем кнопку "Воспроизвести" в нижнем левом углу окна Протеус.