Analogisesta signaalista digitaaliseen laitteeseen. ADC: n rakentamisen periaatteet
Tässä artikkelissa käsitellään eri tyyppisten ADC: n toimintaperiaatteen tärkeimpiä kysymyksiä. Samanaikaisesti analogisen digitaalisen muutoksen matemaattiseen kuvaukseen liittyvät tärkeät teoreettiset laskelmat pysyivät artikkeleiden ulkopuolelle, mutta viittaukset antavat, että kiinnostunut lukija voi havaita ADC-työn teoreettiset näkökohdat. Näin ollen artikkeli koskee suurempaa ymmärrystä ADC: n toiminnan yleisistä periaatteista kuin heidän työnsä teoreettinen analyysi.
Johdanto
Lähtökohtana määritämme analogisen digitaalisen muunnoksen. Analoginen digitaalinen muuntaminen on prosessi, jossa tulosi fyysinen arvo on numeeriseen esitykseen. Analog-to-Digital Converter on laite, joka suorittaa tällaisen muunnos. Muodollisesti ADC: n syöttöarvo voi olla mikä tahansa fyysinen arvo - jännite, virta, vastus, säiliö, pulssiprosentti, akselin kiertokulma jne. Kuitenkin varmuutta, tulevaisuudessa ADC: n alla ymmärrämme yksinomaan muuntimen jännitteen koodi.
Analogisen ja digitaalisen muuntamisen käsite liittyy läheisesti mittauksen käsitteeseen. Mittaus ymmärretään mitatun arvon vertaamalla tietyn standardin kanssa analoginen ja digitaalinen konversio, vertaamalla syöttöarvoa tietyllä viitearvolla (yleensä vertailujännitteellä). Siten analogista digitaalista muuntamista voidaan pitää tulosignaalin arvon mittaamisena ja kaikki metrologian käsitteet soveltuvat siihen, kuten mittausvirheitä.
ADC: n tärkeimmät ominaisuudet.
ADC: llä on paljon ominaisuuksia, joista tärkein muuntotaajuus voidaan kutsua. Muunnon taajuus ilmaistaan \u200b\u200btavallisesti näytteissä sekunnissa (näytteet sekunnissa, SPS), purkaus - bitteissä. Moderneilla ADC: llä voi olla hieman jopa 24 bittiä ja muunnoksenopeus GSPS-yksiköihin (tietenkin, ei samanaikaisesti). Mitä korkeampi nopeus ja purkaus, vaikeampi on saada tarvittavat ominaisuudet, kalliimpi ja monimutkaisempi muunnin. Transformaatio ja bittinopeus liittyvät toisiinsa tietyllä tavalla, ja voimme kasvattaa konversiota, nopeuden uhraamista.
ADC-tyypit
On olemassa monenlaisia \u200b\u200bADC-tyyppisiä, mutta tämän artiklan puitteissa rajoitamme itsemme harkitsemaan vain seuraavia tyyppejä:
- ADC-rinnakkaismuoto (suora muuntaminen, flash ADC)
- ADC johdonmukainen lähentäminen (SAR ADC)
- delta Sigma ADC (ADC veloittamalla)
Suurin nopeus ja alin purkaus on ADC Direct (rinnakkainen) muuntaminen. Esimerkiksi Texas Instruments TLC5540 yhdensuuntainen transformaatio ADC on 40msp: n nopeus hieman vain 8 bittiä. Tämäntyyppisen ADC voi olla muunnoksen nopeus jopa 1 GSPS. Täällä voidaan huomata, että kuljettimen ADC: t (putki ADC) on vielä suurempi nopeus, mutta ne ovat useiden ADC: n yhdistelmä, jolla on vähemmän nopeus ja niiden huomioon ottaminen on tämän artiklan soveltamisalan ulkopuolella.
Keskimmäisen kapean useissa purkausnopeudessa on ADC johdonmukaisen lähentämisen ADC: ssä. Tyypilliset arvot ovat hieman 12-18 bittiä 100SP-1MSPS-muunnostaajuudella.
Suurin tarkkuus saavuttaa Sigma-Delta ADC: n, jolla on hieman jopa 24 bittiä osallistavaa ja nopeutta SPS-yksiköistä KSPS-yksiköihin.
Toinen ADC-tyyppi, joka otettiin käyttöön viime aikoina, on integroitu ADC. ADC: n integrointi ovat lähes kokonaan syrjäyttäneet muut ADC-tyypit, mutta ne voivat tavata vanhoja mittauslaitteita.
ADC: n suora muuntaminen
Suora muunnos ADC jaettiin laajasti 1960-1970, ja alkoi tehdä integroidun piirin muodossa 1980-luvulla. Niitä käytetään usein osana "kuljettimen" ADC: tä (tässä artikkelissa ei oteta huomioon), ja niillä on hieman 6-8 bittiä jopa 1 GSP: n nopeudella.
Suoran muunnos ADC: n arkkitehtuuri on esitetty kuviossa 2. yksi

Kuva. 1. ADC: n suoran muuntamisen rakenteellinen kaavio
ADC: n toimintaperiaate on äärimmäisen yksinkertainen: tulosignaali tulee samanaikaisesti kaikkiin vertailukohteiden "positiivisiin" tuloihin ja useisiin rasituksiin, jotka on saatu viitteestä jakamalla vastukset R. kuvion 2 piirissä. 1 Tämä sarja on näin: (1/16, 3/16, 5/16, 7/16, 9/16, 11/16, 13/16) UREF, jossa UREF on ADC: n tukijännite.
Oletetaan ADC-merkinnälle, jännite toimitetaan 1/2 uref. Sitten ensimmäiset 4 vertailut toimivat (jos lasket alla) ja loogiset yksiköt näkyvät niiden lähdöissä. Priority Encoder (prioriteettikooderi) muodostaa binäärikoodin yksiköiden "sarakkeesta", joka on vahvistettu lähtörekisterin avulla.
Nyt tällaisen muuntimen edut ja haitat ovat selkeitä. Kaikki vertailut toimivat rinnakkain, järjestelmän viiveaika on yhtä suuri kuin viiveaika yhdessä vertailussa ja viiveaika kooderissa. Vertailu ja kooderi voidaan tehdä erittäin nopeasti, minkä seurauksena koko järjestelmällä on erittäin nopea.
Mutta n päästöjen hankkimiseksi 2 ^ n vertailut tarvitsevat (ja kooderin monimutkaisuus kasvaa myös 2 ^ n). KUVA. 1. Sisältää 8 vertailua ja sillä on 3 päästöjä 8 päästöjen saamiseksi, 256: n vertailua, 10 päästöjä - 1024 vertailua varten olisi yli 16 miljoonaa 24-bittisiä mainoksia. Tällaiset korkeudet eivät ole vielä saavuttaneet.
ADC johdonmukainen lähentäminen
Analoginen digitaalinen muunnin (SAR, peräkkäiset lähentämisrekisteri) mittaa tulosignaalin suuruuden, joka suorittaa useita peräkkäistä "punnitusta", eli tulojännitteen arvon vertailut, joiden syntyy useita arvoja seuraavasti:
1. Ensimmäisessä vaiheessa sisäänrakennetun digitaalisen analogisen muuntimen tuotoksessa on asetettu arvo 1 / 2uref (täältä ja oletamme, että signaali on aikavälillä (0 - UREF).
2. Jos signaali on suurempi kuin tämä arvo, sitä verrataan jännitteeseen, joka sijaitsee jäljellä olevan aikavälin keskellä, ts. Tässä tapauksessa 3 / 4UREF. Jos signaali on pienempi kuin asetettu taso, seuraava vertailu tehdään alle puolet jäljellä olevasta aikavälillä (ts. Taso 1 / 4UREF).
3. Vaihe 2 toistetaan n kertaa. Niinpä N: n vertailu ("punnitus") tuottaa tuloksen n bittiä.

Kuva. 2. ADC-sekvenssin approksimaation rakenteellinen kaavio.
Siten peräkkäisen lähentämisen ADC koostuu seuraavista solmuista:
1. Vertailu. Se vertaa syöttöarvoa ja "painon" jännitteen (kuviossa 2. merkitty kolmio).
2. Digitaalinen analoginen muunnin (DAC). Se tuottaa "painon" jännitteen arvon, joka perustuu digitaalisen koodin tuloon.
3. peräkkäinen lähentämisrekisteri, SAR-rekisteri. Se suorittaa peräkkäisen lähentämisen algoritmin, joka tuottaa DAC-tuloon syötetyn nykyisen koodin arvon. Hänen nimensä mukaan kaikki ADC: n arkkitehtuuri on nimetty.
4. Näytteen säilytysjärjestelmä (näyte / pidä, S / H). Se on pohjimmiltaan tärkeä tämän ADC: n toiminnan kannalta, että syöttöjännite ylläpitää jatkuvaa arvoa koko muuntamisjakson aikana. Kuitenkin "todellisilla" signaaleilla on omaisuus muuttaa ajan myötä. Varastointipiiri "muistaa" analogisen signaalin nykyisen arvon ja säilyttää sen muuttumattomana koko laitteen koko käyttöjakson ajan.
Laitteen etu on suhteellisen korkea transformaatioaste: N-bittin ADC: n muunnosaika on n kellot. Muunnon tarkkuus rajoittaa sisäisen DAC: n tarkkuudella ja voi olla 16-18 bittiä (24-bittinen SAR-ADCS, esimerkiksi AD7766 ja AD7767).
Delta Sigma ADC
Ja lopuksi mielenkiintoisin ADC-Sigma-Delta ADC: n, jota kutsutaan toisinaan ADC: n kirjallisuudesta veloituksella. Sigma Delta ADC: n rakennejärjestelmä on esitetty kuviossa 2. 3.

Kuva 3. Sigma Delta ADC: n rakennejärjestelmä.
Tämän ADC: n toimintaperiaate on jonkin verran monimutkaisempi kuin muut ADC-tyypit. Sen ydin on, että syöttöjännitettä verrataan integraattorin kerääntyneeseen jännitearvoon. Integraattorin tulo toimitetaan positiivisilla tai negatiivisilla napaisuuspulsseilla vertailun tuloksesta riippuen. Näin ollen tämä ADC on yksinkertainen seurantajärjestelmä: jännite integraattorin "Tracks" -lähtöön tulosijännitteen (kuva 4). Tämän järjestelmän tulos on nollien ja yksiköiden virtaus vertailijan tuotoksessa, joka sitten siirretään digitaalisen FGH: n kautta, tuloksena saadaan N-bittinen tulos. FRX kuv. 3. Yhdessä "Decimator" -laitteen kanssa laite, joka vähentää näytteiden taajuutta "harvennuksella".

Kuva. 4. Sigma-Delta ADC seurantajärjestelmänä
Esityksen tiukan vuoksi on sanottava, että kuviossa 2 on sanottava. Kuvio 3 esittää ensimmäisen tilauksen ADC: n Sigma-Delta-lohkokaavion. Sigma-Delta ADC: n toisessa järjestyksessä on kaksi integraattoria ja kaksi palautekirjaa, mutta sitä ei oteta huomioon täällä. Olet kiinnostunut tästä aiheesta voi viitata.
Kuviossa 1 Kuvio 5 esittää signaaleja ADC: lle nollatasolla tuloaukossa (ylhäältä) ja VREF / 2-tasolla (pohja).

Kuva. 5. Signaalit ADC: ssä tulosignaalin eri tasoilla.
Nyt ilman monimutkaisen matemaattisen analyysin syventämistä yritämme ymmärtää, miksi Sigma Delta ADC: llä on hyvin alhainen oma melu.
Tarkastellaan kuviossa 2 esitetyn modulaattorin Sigma-delta. 3 ja kuvittele se tässä muodossa (kuva 6):

Kuva. 6. Sigma Delta -modulaattorin rakenteellinen järjestelmä
Tässä vertailija esitetään ylläpitäjänä, joka tiivistää jatkuva käyttökelpoinen signaali ja kvantisointikohina.
Oletetaan, että integraattorilla on 1 / s vaihteisto. Sitten, edustaa käyttökelpoisen signaalin X (S), modulaattorin Sigma Delta Koska Y (S) ja kvantisointikohtaan E (S), saamme ADC-vaihteiston suhde:
Y (S) \u003d X (S) / (S + 1) + E (S) S / (S + 1)
Toisin sanoen Sigma Delta -modulaattori on alhainen taajuussuodatin (1 / (s + 1)) hyödylliselle signaalille ja suurtaajuussuodattimella (S / (S + 1)) kohinaa varten ja molemmilla suodattimilla on sama rajataajuus . Digitaalinen FNH poistetaan helposti spektrin suurtaajuusalueelle, joka seisoo modulaattorin jälkeen.

Kuva. 7. Melun "siirtymisen" ilmiö spektrin suurtaajuusosassa
On kuitenkin ymmärrettävä, että tämä on äärimmäisen yksinkertaistettu selitys Sigma Delta ADC: n melun siirtymisen ilmiöstä.
Joten Sigma Delta ADC: n tärkein etu on suuri tarkkuus johtuen äärimmäisen alhaisen tason omasta melusta. Korkean tarkkuuden saavuttamiseksi on kuitenkin välttämätöntä, että digitaalisen suodattimen leikkaustaajuus voi olla mahdollisimman alhainen, monta kertaa pienempi kuin modulaattorin Sigma Delta. Siksi Sigma Delta ADC: llä on alhainen transformaatioaste.
Niitä voidaan käyttää äänilaitteissa, mutta tärkein käyttö löytyy teollisesta automaatiosta anturin signaalien muuntamiseksi mittauslaitteissa ja muissa sovelluksissa, joissa tarvitaan tarkkaa tarkkuutta. Mutta ei vaadita nopeita.
Vähän historiaa
Vanhin maininta ADC: stä historiassa on luultavasti Paul M. Rainey, "FACSIMILE TELEGRAPH SYSTEM, USA Patenttijulkaisu 1,608,527, jätetty 20. heinäkuuta 1921, julkaistiin 30. marraskuuta 1926. Patentissa kuvattu laite on itse asiassa 5-bittinen ADC-suora muuntaminen.

Kuva. 8. Ensimmäinen patentti ADC: lle

Kuva. 9. Suora muunnokset ADC (1975)
Kuviossa oleva laite on ADC Direct Conversion MOD-4100, joka on tuotettu tietokone laboratorioilla, 1975 vapauttamalla, joka on koottu erillisten vertailijoiden perusteella. Vertailijat 16 kpl (ne sijaitsevat puoliympyrässä, jotta signaalin etenemisen viivästyminen kussakin vertailiutomaa varten), joten ADC: llä on vähän kaikkia 4 bittiä. MSPS-transformaation nopeus, 14 watin virrankulutus.
Seuraavassa kuvassa näkyy ADC: n suoran muuntamisen edistynyt versio.

Kuva. 10. Suora muunnos ADC (1970)
Tietokoneen laboratorioiden VHS-630: n laite sisälsi 64 vertailua, oli hieman 6 bittiä, nopeus 30mms ja kulutettiin 100 wattia (versio 1975 VHS-675 oli nopeus 75 MSP: tä ja 130 watin kulutusta ).
Kirjallisuus
W. Kester. ADC-arkkitehtuurit i: Flash Converter. Analogiset laitteet, MT-020-opetusohjelma.
Analogiset digitaaliset muuntimet on suunniteltu muuntaa analogiset signaalit (tavallisesti jännitteet) digitaaliseen muotoon (digitaalisten jännitearvojen sekvenssi, mitataan yhtä suurina välein). Yksi analogisten digitaalimuuntimien tärkeimmistä parametreista on sen tuotoksen bitti. Tämä parametri, joka tarjoaa muuntamisen signaali-kohinasuhteen ja lopulta digitaalisen signaalin dynaamisen alueen. ADC: n purkaus yrittää lisätä signaali-kohinasuhdetta. Analogi-digitaalisen muuntimen signaali-kohinasuhde voidaan määrittää seuraavalla kaavalla:
Sn \u003d N. × 6 + 3,5 (dB)missä N. - Binary-päästöjen määrä ADC-tuotoksessa.
ADC: n yhtä tärkeä parametri on vastaanottoaika sen lähetykseen digitaalisen signaalin seuraavaan viitteeseen. Samaan aikaan korkea transformaation nopeus ja suurempi bitti hinta on erittäin vaikea tehtävä, ratkaista suuri määrä analogisia digitaalisia muuntimia. Harkitse niiden pääominaisuuksia ja sovelluksia.
Suurin näkemys ADC: stä ovat. Näissä tyypeissä ADC: t on lähetettävä suuret datavirrat, joten ne lähetetään rinnakkain. Tämä johtaa siihen, että rinnakkaiset ADC: llä on suuri määrä ulkoisia päätelmiä. Tämän seurauksena rinnakkais-ADC: n mikrokäytön mitat ovat riittävän suuria. Toinen rinnakkais-ADC-ominaisuus on merkittävä kulutusvirta. Tämäntyyppisen ADC: n luetellut haitat ovat maksu suurella nopeudella analogisen signaalin muuntamiseksi digitaaliseksi muotoksi sen esittelyssä. Muunnosnopeus rinnakkain ADC saavuttaa 500 miljoonaa näytettä sekunnissa (500 MSP). Kotelnikov teoremin avulla tulosignaalin maksimitaajuus voi saavuttaa 250 MHz. Esimerkkinä voit soittaa AD6641-500-mikrokäytön analogisten laitteiden tai yrityksen ISLA214P50 mikroKäynnin.
Jotta saavutettaisiin jopa korkeammat muutosnopeudet, rinnakkaisliitäntä käyttää useita rinnakkaisia \u200b\u200bADC-sovelluksia, jotka toimivat vuorotellen. Samalla varmistaa tietojen siirtämisen käsittely sirulle, sinun on käytettävä useita rinnakkaisia \u200b\u200brenkaita (yksi jokaisessa ADC: ssä). Esimerkkinä samanlaisista analogisista digitaalisten muuntimien tyyppistä voit soittaa Maxim ADC Max109-mikrokytkimeen, joka takaa muunnoksen nopeuden 2,2 GSP: iin.
Hieman taloudellisempi ADC-tyyppiä ovat. Tällaisissa ADC-tyypeissä digitaaliset analogiset muuntimet ovat mukana analogisen digitaalisen muuntamisen prosessissa. Analogisen signaalin lähdön korkea syöttönopeus toteutetaan kuljettimen käsittelyn vuoksi. Tämän seurauksena peräkkäisen rinnakkaisen FWG: n osalta transformaationopeus ja seuraavan digitaalisen viitteen antamisen antaminen ei vastaa. Analogisia laitteita voidaan kutsua AD6645: ksi analogisten laitteiden AD6645 ja AD9430 mikrokurssiksi.
Yleisin ADC: n tyyppi on tällä hetkellä. Huolimatta siitä, että kuljettimen tietojenkäsittely on mahdotonta tällaisissa analogisilla digitaalisilla muuntimilla, mikä tarkoittaa muuntamisaikaa ja tiedonsiirtoa ADC-tuotoksessa samanaikaisesti, tämän tyyppisellä ADC: llä on riittävä nopeus toimimaan monilla eri valikoimilla Tehtävät.
Tällä hetkellä näytteenotto- ja tallennuslaitteissa (UHH) ja jännitteen muuntaminen binäärilukuihin (digitaaliset signaalilukut) tehdään yhdessä sirussa. Kuviossa 1 on esitetty tyypillinen järjestelmä, jolla se kääntyy samanaikaisesti rinnakkaisesta ulostuloksesta.
Kuva 1. Rinnakkaisen ADC ADC0804: n sisällyttäminen
Tässä järjestelmässä analogisen digitaalisen muunnosten aloittamiseksi mikroprosessori tai ohjelmoitava logiikkapiirin on lähetettävä muunnossignaali (tässä järjestelmässä se on WR-signaali). Kun ADC-mikrokytkimen muuntaminen on valmis, tietojännitelviesti ja mikroprosessoria voidaan pitää binaarikoodina, joka vastaa tulonjännitettä. Kun kotelnikov teoremin signaali muunnettiin, diskretistustaajuus f.d siirtyy tuloon ja sen stabiilisuutta tarjoavat mikroprosessorin.
On huomattava, että alhaisen taajuussignaalien käsittelyssä on usein tarpeen suorittaa analoginen ja digitaalinen muuntaminen ja digitaalinen analoginen muuntaminen. Joissakin tapauksissa vaaditaan yhdellä mikrotyössä useiden analogisten kanavien yhdistämiseksi esimerkiksi stereopohjaus äänen. Lisäksi tällaisissa siruissa on matalataajuisia tai nauhan suodattimia koostumuksessaan, käyttövahvistimissa, mikä mahdollistaa signaalin syöttämisen suoraan mikrofonilähtöstä ja ulostulosta puhelimeen. Samanlainen ADC / DAC-mikrokäytön tyyppi sai erityisen nimen - koodekit.
Kirjallisuus:
- Analod-digitaalinen muuntaminen, Walt Kester Editor, Analogiset kehittävät, 2004. - 1138 s.
- Mixed-signaali ja DSP Design Techniques ISBN_0750676116, Walt Kester Editor, Analog Devioes, 2004. - 424 s.
- High Speed \u200b\u200bSystem -sovellus, Walt Kester Editor, Analoginen kehitys, 2006. - 360 s.
Yhdessä artikkelin "tyypin analogiset digitaalikuntamuuntimet (ADC) Lue:
4. Muunna analoginen signaali digitaaliksi. Johdatus erikoisuuteen4. Muunna analoginen signaali digitaaliksi
Digitaaliset signaalit
Maailmassa digitaalinen puhelinkehitys kehittää nyt aktiivisesti. Digitaalisen puhelinviestinnän laatu on huomattavasti korkeampi kuin tavallinen, koska digitaaliset signaalit pelkäävät kaikenlaista häiriöitä. Digitaalinen puhelin antaa meille mahdollisuuden tarjota meille paljon lisäpalveluita. On mahdollista muodostaa yhteyden samaan puhelinlinjaan, se näyttää ulospäin täysin erilaisista laitteista - puhelin ja henkilökohtainen tietokone. Digitaalisen puhelinverkon kautta henkilökohtaisten tietokoneiden omistajilla on pääsy tietopankkien monenlaisiin tietoihin.
Kodimme digitaalinen kaapelitelevisio tulee, mikä antaa kuvan poikkeuksellisen selkeyden ja maalien kosketuksen; Store hyllyillä näemme digitaalisia ääni- ja videolaitteita, jotka tarjoavat ainutlaatuisen äänenlaadun ja kuvien. Mikä on digitaalinen signaali? Ensimmäistä kertaa havaitsimme sen, kun he keskustelivat mustavalkoisesta kuvasta saatu faksignaali, joka ei sisällä rasterointia.
Digitaaliset signaalit ovat Telegraph-signaaleja ja tietokoneen tuottamia tiedonsiirtosignaaleja. Siksi voidaan sanoa, että digitaalinen signaali on pulssien sekvenssi. Jos se on huolestunut pulssin läsnäolosta 1, ja sen puuttuminen 0: sta, pulssisekvenssi voidaan esittää kahden numeron vaihtoehdoksi: 0 ja 1. Näin ollen nimi "Digitaalinen signaali" tulee näkyviin. Numero, joka vastaanottaa vain kaksi arvoa: 0 ja 1 kutsutaan "binaarinumeroiksi". Käännetty englanniksi Se kuulostaa "binaarinumeroiksi". Käytännössä vähennys laadittiin laajalti englannin kielen alkuperäisistä ja viimeisistä kirjeistä, toisin sanoen eli sana "bitti", joka luetaan englanniksi bitti. Joten yksi asema digitaalisessa signaalissa on 1 bitti; Se voi olla joko 0 tai 1. Digitaalisen signaalin kahdeksan asentoa yhdistyvät käsite tavu. Kun lähetät digitaalisia signaaleja, käsite syötetään luonnollisesti lähetysnopeudet - Tämä on määrä, joka kulkee ajan mittayksikköä kohti, useimmiten sekunnissa.
Analogisten signaalien diskretisointi
Luontona monet signaalit (puhelin, faksi, televisio) eivät ole digitaalisia. Nämä ovat analogisia tai jatkuvia, signaaleja. Onko mahdollista "siirtää" ihmisen puhetta nollien ja yksiköiden kielelle säilyttäen samalla ihmisen äänen koko rikkaat maalit, koko ihmisen tunteiden valikoima? Toisin sanoen puhumme jatkuvan prosessin korvaamisesta numeron sekvenssillä menettämättä tietoja jatkuvasta prosessista.
Samankaltaisella ongelmalla, meillä on usein elämässä melko usein. Jos hyvin lyhyiden väliajoin (sanotaan, 1c), käytä ilman lämpötilan lämpötilaa kartalla, saamme monia pisteitä, jotka heijastavat lämpötilan muutosta (kuva 4.1). Siksi meillä ei ole väliä jatkuvan lämpötilan muutoksen käyrän kanssa, mutta vain sen arvot lasketaan tietyin väliajoin. Pohjimmiltaan kuvaili jatkuvaa prosessia desimaalilukujen sekvenssillä. Tätä prosessia kutsutaan diskretisointi Jatkuva signaali. Epäselvä kysymys on edelleen, kuinka usein jatkuvan käyrän laskentaarvot olisi otettava seuraamaan kaikkia muutoksia. Joten pidempään ajanjaksolla ilman lämpötilassa olevien havaintojen välillä ei ole mahdollista seurata kaikkia sen nopeita muutoksia.

Samanlainen lähestymistapa on puhelimen näytteenottoprosessissa. Jos mikrofonipiirissä (kuva 4.2), jossa virta on jatkuva ajankohta, upottaa sähköinen avain ja säännöllisesti sulkea sen, ketjun virta on kapea pulssit, joiden amplitude toistaa muodon jatkuva signaali, eikä mikään muu kuin diskreetti signaali (ks. Kuva 4.2). Aikaväli, jonka kautta jatkuvat signaalin arvot näytteenottoväli. Käänteisarvo (me merkitsemme sitä) kutsutaan laskenta-taajuudeksi tai näytteenottotaajuus.

Jatkuvan signaalin laskemiset sekä lämpötila-arvot on otettava tämän taajuuden (tai tällaisen aikavälin jälkeen), jotta kaikki nopeimmat, signaalin muuttuvat. Muussa tapauksessa, kun se palauttaa tämän signaalin diskreteiksi viitteiksi, osa informaatiosta menetetään ja talteen otetun signaalin muoto poiketa lähteen muodossa (kuvio 4.3). Tämä tarkoittaa, että vastaanoton ääni havaitaan vääristymillä. Jos haluat käsitellä tätä kysymystä, aloitetaan merkkijono vaihtelee. Kosketit merkkijonoa, hän alkoi värähtyä ja puristaa liikkeellään ja purkaa sitten ympäröivä ilma tai toisin sanoen sitten lisätä ja sitten vähentää paineensa. Lisääntyneiden ja alennetun paineen ilmakerrokset alkoivat hajottaa kaikkiin reittiohjeet vaihtelevasta kehosta. Muodostettiin ääni aalto. Jotain samankaltaista havaitaan, kun heitämme kiviä veteen ja katsomme aallot poikkeavat ympyrät. Näiden aaltojen kammioita voidaan verrata paineilman alueelle, masennuksiin - harvaan ilmaan. Merkkijonosta etenevä ääni-aallon paine vaihtelee ajoissa sinusoidien laki. Seuraa kaikkia muutoksia, tietenkin riittää ottamaan laskentaarvot hetkessä, jotka vastaavat sinusoidien enimmäismäärää ja minimiä. Taajuus on suurempi kuin vähintään kaksi kertaa äänen värähtelyn taajuus. Jos esimerkiksi merkkijono suorittaa 20 värähtelyä / s (taajuus 20 Hz), suurin äänenpaine havaitaan jokaisen 1/20 s: n, ts. 50 ms: n jälkeen. Äänenpaine-käyrän maksimi ja minimi erotetaan 25 ms: n välein. Joten käyrän laskentaarvoja on noudatettava vähintään 25 ms: ssä tai taajuudella 40 näytettä / C (40 Hz). Tyypillisesti käyrän laskentaarvot ovat "varalla": Ei 2 kertaa useammin kuin ääni epäröi, mutta sanoa, 10 kertaa. Tällöin ne ovat hyvin hyvin lähettäneet käyrä. Tapaus on mielenkiintoinen, kun ääniaallot lähettävät kaksi samanaikaisesti pyörivää merkkijonoa. Kuviossa 1 4.4 Kolme vaihtoehtoa esitetään: toinen merkkijono vaihtelee 2, 3 ja 10 kertaa useammin kuin ensimmäinen. Kahden äänen aallon paine levyyn, joka on asetettu niiden polkuihin, taivutetaan. Tuloksena olevan paineen kaavio ei enää ole sinimuoto. Näemme, että tämän käyrän nopeat muutokset johtuvat korkeammasta taajuusoscillation (tässä tapauksessa toisessa merkkijono värähtelyssä). Jotta voitaisiin seurata kaikki nopeat muutokset tuloksena olevaan äänenpaineeseen, laskentaarvot on otettava taajuudella vähintään kaksi kertaa toisen merkkijonon värähtelyn taajuudesta. Viimeisessä suoritusmuodossa laskentataajuuden tulisi ylittää 400 Hz. Tämä tarkoittaa, että lukuarvoja on noudatettava vähintään 1/400 \u003d 0,0025 C \u003d 2,5 ms ja paremmin - jopa useammin, esimerkiksi 0,5 ms: n jälkeen. Tutkimuksessa puhetta huomasimme, että ihmisen äänenvoimakkuus on merkitty merkkijonojen roolin. Näiden "merkkijonojen" suurimman taajuuden värähtely, joka ITU: n mukaan on myös otettava huomioon, on taajuus 3400 Hz. Kun siirryt analogisesta puhesignaalista digitaaliseen, tämä arvo on yleensä pyöristetty jopa 4000 Hz. Tämä tarkoittaa sitä, että kun vaihdat jatkuvaa sähkövirran käyrää puhelimen mikrofonin ulostulossa, seuraavat arvot on otettava 8000 Hz: n taajuudella tai toisin sanoen vähemmän kuin 1/8000 \u003d 0,000125 c \u003d 125 μs.

Jos haluat palauttaa lähdesignaalin erillisestä, ohita riittävästi diskreetti signaali pohjataajuussuodattimen läpi kaistanleveydellä F. Ja tukahduttaa kaikki "sivu" spektrit. Tällaisen suodattimen tuotoksessa alkuperäisen jatkuvan signaalin tulee näkyviin. Liian harvinaisen näytteenotto (alhainen näytteenottotaajuus ja suuri näytteenottoväli), lähteen signaalin "puolella" spektrin spektrillä on asettaminen. Tämä aiheuttaa vääristymän lähderpektrin muodon, ja se tarkoittaa, että muokatun signaalin välinen ero alkuperäisestä. Päinvastoin, useammin näytteenotto helpottaa jatkuvan signaalin palauttamista erillisestä käyttäen yksinkertaista matalapasuodatinta. Tällä tavalla, jatkuvan signaalin tuntemattoman restauroinnin vuoksi näytteenottotaajuus on välttämätöntä. valitse ei pienempi kuin kaksinkertaisti sen spektrin leveys. Puhelinsignaalille, kuten näemme sen, \u003d \u003d 8 kHz. Vuonna 1933, työssä "" eetterin "ja langan kaistanleveydellä" V.A. Kotelnikov osoittautui teorian, joka on tullut olennainen digitaalisen viestinnän teoriassa ja tekniikassa. Tämän teoreen ydin on se, että jatkuva signaali, jonka spektri on rajoitettu taajuudella F.voi olla täysin ja yksiselitteisesti palauttaa sen erilliset viitteet, jotka on otettu taajuus \u003d 2 F.. Aikavälein. Emme anna teoremin täydellistä matemaattista muotoilua, samoin kuin todisteita, mutta vain rajoittuu vain teorian olemuksen osoitus.
Kvantisointi
Anna jatkuvan signaalin harkinnan seurauksena s.(t.) Saatiin kapeita pulsseja, mikä on tavoiteasignaali. Impulssi-amplitudit ovat yhtä suuret tässä tapauksessa instant signaalin arvot s.(t.) hetkinä, missä i. \u003d 0, 1, 2, 3, ...; - impulssien aika tai näytteenottoväli.

Tuloksena oleva tavoiteasignaali quantovania tasolla (kuva 4.5). Tee tämän, mahdollisten amplitudi-arvojen valikoima (eli ensisijaisen signaalin arvot) on jaettu segmentteihin, joita kutsutaan kvantisointivaiheet . Näiden segmenttien rajat sallitaan välittää pulssien amplitudien arvot. Näin ollen lähetettyjen pulssien amplitudit ovat yhtä suuria kuin ensisijaisen signaalin ei-hetkelliset arvot ja lähimmät sallitut tasot. Tällaista ensisijaisten signaalien muuttamista voidaan kutsua kvantisoitu amplitudi-pulssi-modulaatio(Kaim). Kaimen-signaalin erityispiirteet ovat, että kaikki sen tasot voidaan numeroida (ja niiden lukumäärän, vaikkakin suuret, mutta lopullinen) ja siten vähentämään Kaim-signaalin lähettämistä tasonumeroiden tasolle, että tämä signaali ottaa tämän signaalin hetkiä. Jos kvantisointivaiheet ovat samat ja riippumattomia kvantisointitasolla, kvantisointi kutsutaan yhtenäiseksi. Se on mahdollista epätasainen kvantisointi, jossa kvantisointivaiheet ovat erilaiset. Kvantisointiprosessissa ilmenee virhe siitä, että lähetetty kvantisoitu signaali eroaa todellisesta. Tätä virhettä voidaan pitää tietyn häiriöiden kvantisointikohina. Jälkimmäinen on satunnainen pulssisekvenssi (kuva 4.6), jonka amplitudin enimmäisarvo ei ylitä puolet kvantisointivaiheesta. Mitä pienempi kvantisointivaihe, vähemmän melu, mutta useampi kuin lähetettyjen tasojen määrä. Seuraava vaihe signaalin muuntamisessa koostuu kvantisoidusta tavoiteasignaalista digitaaliseksi. Tätä toimintoa kutsutaan koodaus Kaim-signaalit.
Koodaus
Saat perehtyä yhteen upeaan omaisuuteen numerojärjestelmän - sijainti. Minä näytän jonkinlaista numeroa, esimerkiksi 777. Siinä sama merkki "7" osallistuu 3 kertaa, mutta kun se on oikealla, se tarkoittaa seitsemää yksikköä, keskustassa - seitsemän tusinaa vasemmalla - seitsemänsataa. Näin ollen numeroita numerolla voi olla sama samalla tavoin ja digitaaliset arvot ovat erilaiset riippuen paikasta, asennosta, purkautumisesta, josta se on sen arvoista. Tämän määrän rakentamisen periaatetta kutsutaan paikallisiksi tai paikannusiksi. Voit kirjoittaa mielivaltaisesti suuria määriä tarpeeksi kymmenen numeroa! Jokainen asema tai purkautuminen numerolla on tietty "paino" (yksiköt, kymmeniä, satoja jne.), Joten numero 777 voidaan kirjoittaa
777 \u003d 7 × 10 2 + 7 × 10 + 7,
nuo. Seitsemänsataa plus seitsemän tusinaa plus seitsemän yksikköä. Jos soitat Algebra auttamaan ja kirjoittamaan kirjaimia numeron sijaan, voit saada tällaisen tavallisen numeron numeron:
Tai lyhennetty - kertoimien kautta, jos alentatko numeron 10 astetta:
.
Numero 10 on numerojärjestelmän perusta. Kertoimet (yksiköiden lukumäärä) (toisen luokan yksiköiden määrä, toisin sanoen kymmeniä), (kolmansien luokkien lukumäärä, ts. Sata) jne. Voi ottaa arvoja, jotka eivät ylitä järjestelmän pohjaa: 0 - 9. Vuonna 1665 Ranskan matemaatikko B. Pascal osoitti, että numero voidaan ottaa numerojärjestelmän pohjaan, mikä tarkoittaa, että jokainen numero voi olla edustettuna Astetta ei ole numero 10, mikä tahansa muu kokonaisluku. Valitsemme esimerkiksi numeron 7:
On selvää, että kertoimien arvot ![]() Nyt ei saa olla enempää kuin uusi säätiö, ts. 7: Ne voivat ottaa arvoja 0 - 6. Kuvittele seminaarijärjestelmän numero 777, hajottaa sen pohjan 7 asteina:
Nyt ei saa olla enempää kuin uusi säätiö, ts. 7: Ne voivat ottaa arvoja 0 - 6. Kuvittele seminaarijärjestelmän numero 777, hajottaa sen pohjan 7 asteina:
.
Jos poistat numeron 7 aste, kun teemme numeroita desimaalijärjestelmässä, saamme tämän numeron seminaali tallennuksen: (2160) 7. Tässä indeksin numero 7 ilmaisee järjestelmän pohjan. Viiden päivän paikannusjärjestelmässä vain viisi numeroa: 0, 1, 2, 3, 4. Numero 777 toimitetaan "viiden", "kaksikymmentä hyvitys" jne.:
.
Katsotaanpa, miten numero 777 esitellään kahdestoista järjestelmässä. Koska sen pitäisi olla kaksitoista numeroa, ja tiedämme vain kymmenen, sinun täytyy syöttää kaksi muuta numeroa, merkitsee 10, sanotaan kirjain A ja 11 - kirjain B. Tuloksena saamme
.
Kuten näette, voit luoda monia erilaisia \u200b\u200bpaikannusjärjestelmiä, jotka eroavat toisistaan \u200b\u200bvain perusteilla. Ja kaikki, yleisesti ottaen, ovat vastaavia: kukaan niistä ei ole nimenomaisia \u200b\u200bedut toiseen! Numero 2 on pienempi, joka voidaan ottaa numerojärjestelmän pohjaan. Siksi binäärilukujärjestelmässä vain kaksi numeroa: 0 ja 1. Binäärijärjestelmän numero tallennetaan seuraavasti:
.
Jos numeron (tai purkauksen) desimaalijärjestelmä "paino" on jossain määrin yhtä suuri kuin numero 10, sitten binaarisessa järjestelmässä, sen sijaan, että numero 10, ensimmäinen 13 asenteen "painot" Binääriluvulla on seuraavat arvot:
Yritetään tallentaa numero (777) 10 binaarinumerojärjestelmässä, joka edustaa sitä hajoamisen muodossa TWOS: n asteessa ja hylkää myöhemmin kun tallennat itseäsi:
Joten binäärinen numerojärjestelmän sijaan 777 sen sijaan, että sinun on kirjoitettava numero 1100001001. Binäärijärjestelmän numeron ennätyksen jälkeen kukin asento on binaarinumero. Sen sijaan, että kaksi sanaa "binäärinen numero" käyttää yhtä sanaa: "bitti". Olemme jo maininneet, että se tapahtui englanninkielisestä "bit", joka koostuu lauseen "binaarisen numeron" alkuperäisistä ja viimeisistä kirjeistä, jotka käännetty englannista tarkoittaa "Binary Digit". Yhden bitin avulla voit tallentaa vain numeron 0 ja 1, kaksi bittiä - numero 0 - 3, kolme bittiä - numerot 0 - 7, neljä bittiä - numerot 0 - 15 jne.
Desimaalin ennätys: |
||||||||||||||
Binaarinen tallennus: |
||||||||||||||
Voit tallentaa numeroita 0 - 1000, tarvitsemme kymmenen bittiä. Binäärisen numeron järjestelmässä jopa suhteellisen pieni määrä on paljon paikkoja. Kuinka kääntää erilliset mikrofonin nykyiset arvot digitaaliseksi binaarikoodiksi? XVIII-luvulla suurin matemaatikko L. Euler osoitti, että käyttämällä painoja 1, 2, 4, 8 ja 16 kg, voit punnita lastin tarkkuudella 1 kg. Punnituskuormitus (merkitsemme sen massalla M., kg) Matemaattisesti voit kuvitella, miten
Missä jokainen kerroin a. \u003d 1, jos vastaava paino asetetaan asteikkojen asteikolle, a. \u003d 0, jos tämä Gayler ei käytä punnittaessa. Tällöin punnitusmenetelmä vähenee binäärilukujärjestelmän desimaalilaitteeseen. Selitä tämä esimerkissä. Olkoon sinun tarvitsee punnita 21 kg painavaa kuormaa. Laitamme ensin vaa'an asteikon suurimman gircuit - paino 16 kg. Koska se ei vedä lastia, jätä girut kulhoon (\u003d 1) ja lisää seuraava - 8 kg. On selvää, että tässä tapauksessa painojen painoarvot vetävät kulhon lastin kanssa. Poistamme tämän painon (\u003d 0) ja asetamme 4 kg: n painon. Punnitsemisen jälkeen näemme, että 16, 4 ja 1 kg: n painot pysyivät asteikolla. Kertoimien arvot antavat numeron 21 viisinumeroisen binäärikoodin 10101. Mekaaninen kuormitus Punnitsimme mekaanisilla asteikolla. Ottaen huomioon elektronisen avaimen tuotos, eräänlainen "sähköinen lastin", voit suorittaa samanlaisen punnituksen, mutta tällä kertaa sähköisesti. Tällaisia \u200b\u200b"elektronisia vaa'at" kutsuttiin kooderiksi (Englannin kokoonpanokooderista). Oletetaan, että laskentavirtaarvo on 21 mA. Encoderin "sähköisten painojen" rooli suorittaa 16, 8, 4, 2 ja 1 MA, jotka on tuotettu erityisellä laitteella. Jokainen näyte sopii tähän tai että "paino" tai ei - tehdään tiukasti asennettuina aikavälein. Koko punnitusmenetelmä pitäisi päättyä saapumisen jälkeen seuraavan laskentavirran arvon sähköisestä avaimesta (muistutus puheen ääniä varten, tällä kertaa tällä kertaa on vain 125 μs). Joten ensin, laskentavirtaa verrataan standardiin, joka on yhtä suuri kuin 16 mA, ja koska se on suurempi kuin standardi, nykyinen pulssi näkyy kooderin ulostulossa, joka vastaa binääriumeroa 1. Seuraava 8 mA Arvo lisätään ensimmäiseen viitevirtaan. Nyt "sähköisen giri" kokonaispaino on 24 mA. Tämä on enemmän sanamuotoarvoa, joten toinen vertailugeneraattori on pois päältä. Tällä aikavälillä nykyinen pulssi kooderin tuotoksessa ei näy, mikä vastaa binaarinumeroista 0. Meidän lukijat voivat helposti täydentää punnitusmenetelmää. Siten yhden sanamuotoarvon punnituksen aikana kooderi tuottaa pulssisarjan, joka toistaa täysin mikrofonivirran laskentaarvon binäärikoodin. On mahdotonta olla muistuttamatta uudelleen yhdestä vääristymismuodosta, joka ilmenee, kun laskentaarvo siirretään binaarikoodiin. Joten, jos koodaus altistetaan 21,7 mA: n laskentaarvolle, kooderi näyttää edelleen koodin 10101, kuten koko arvo 21 mA. Tämä on ymmärrettävää, koska "punnitus" toteutettiin tarkkuudella 1 mA - pienimmän "sähköisen painotuksen" paino. Tällaista numeron pyöristämistä tekniikassa kutsutaan kvantisointiin ja binaarikoodin laskentavirran ja binäärikoodin arvon välistä eroa kutsutaan kvantisointivirheeksi. Kuitenkin kvantisointivirheiden aiheuttamat vääristymät voivat olla mahdollisia, jos ne eivät ole lainkaan poissuljettu, ainakin huomattavasti vähentävät. Anna esimerkiksi pienin "sähköinen paino", on "paino" 0,125 mA. Sitten ottaa kahdeksan "Giri", joka vastaa 16; kahdeksan; neljä; 2; yksi; 0,5; 0,25; 0.125 MA, voit "painaa" laskenta nykyisiä arvoja tarkkuudella 0,125 mA. Samanaikaisesti numero 21 edustaa 8-bittistä binäärikoodia 10101000 ja numero 21.7 - koodi 10101101, jossa viimeiset kolme numeroa keskimääräinen lisäaine 0,625 numeroon 21. 12-bittisen binaarikoodin käyttö mahdollistaa sen sijaan numero 21.7 soittamaan hyvin lähelle sitä. Numero 21 6921895. Integroidun mikrokäytön kehittämisen onnistumiset antoivat meille mahdollisuuden yhdistää elektronisen avaimen ja kooderin yhden pienen mikrosirun tapauksessa. Tämä siru muuntaa jatkuvan (usein sanan analogisen) sähköisen arvon binaarisessa digitaalisessa koodissa ja tunnetaan nimeltään analoginen-digitaalinen muunnin (ADC). ADC: t valmistetaan 8-, 10- ja 12-bittisillä binäärikoodeilla. On mielenkiintoista laskea, mitä nopeudella on digitaalinen virta, joka on saatu jatkuvasta puhelinsignaalista näytteenottamalla se 125 μs: n ja 8-bittisen koodauksen jälkeen. Toinen mikrofonivirta vaihtelee 8000 kertaa. 8-bittisessä kooderissa kukin mitattu virran arvo näyttää olevan binaarinen sana 8 bittiä. Se tarkoittaa, että linjalle lähetetään 8000 × 8 \u003d 64000 bittiä joka toinen \u003d 64000 bittiä, ts. Digitaalisen virran nopeus on 64 kbps.
Koodin yhdistelmä 8 bittiä, joka muodostaa binäärisen sanan, kutsutaan tavu. Kussakin koodisymbolit erotetaan toisistaan \u200b\u200baikavälillä t.t, ts. seuraa taajuutta. Tätä taajuutta kutsutaan lasikupu. Jatkuvan signaalin lähtölaskennan muuntaminen binäärikoodiin kutsutaan impulssikoodin modulaatio (ICM). Tällä hetkellä tämä menetelmä digitaalisten signaalien saamiseksi analogisesta on yleisimpiä. Lähetysjärjestelmät, jotka käyttävät tätä signaalien muuntamista kutsutaan IRM-järjestelmiksi. Ulkomaisessa kirjallisuudessa käytetään PCM-lyhennettä (englanninkielisistä sanoista pulssikoodin modulaatiosta, joka käänsi vain pulssi-koodimodulaatiota).
Analogisten signaalien palauttaminen
Kaikki signaalien demodulaatiolle tarkoitetut laitteet otetaan huomioon, kun tutkitaan näihin järjestelmiin sisältyvät erityisiä lähetys- ja laitejärjestelmiä. Kun vastaanotat IRM-signaaleja analogisen signaalin palauttamiseksi, sinun on muunnettava digitaalinen signaali (binääripulsseiden sekvenssi) kvantisoidun AIM-signaalin (tällainen muuntaminen kutsutaan dekoodaus) ja sitten toteuttaa demodulaation toiminta, ts. Asetukset AIM-signaalin analogisesta signaalista s.(t.). Joten, kun käytät IRM: tä, suoritetaan analogisen signaalin muuntaminen: vaihteistossa - amplitudi-pulssimodulaatio, kvantisointi ja koodaus; Vastaanottopisteessä - kvantisoidun tavoiteasignaalin dekoodaus ja demodulointi. Vastaanotossa saatu analoginen signaali eroaa lähetetystä, koska se on muodostettu kvantisoiduista pulsseista, joiden amplitudit ovat yhtä suuria kuin signaalin ei-hetkelliset arvot s.(t.) ja lähimmät sallitut arvot. Siten kvantisointitoiminta tekee signaalinsiirtoprosessin kohtuuttoman virheen, joka on pienempi kuin enemmän kvantisointitasoja. Ja miten selvittää, mitä desimaaliluku on piilossa hänen ennätyksensä alla binaarisessa järjestelmässä? Sääntö on yksinkertainen: jokaisen binääriluvun purkamisen alla olisi kirjoitettava "Paino". Nämä "painot", jotka vastaavat yksittäisiä päästöjä, on taitettava. Tuloksena oleva määrä ja näkyy desimaaliluku. Täällä meillä on binaarinumeron numero 1001011. Teemme edellä mainittujen:

Kuten voimme nähdä, meille kiinnostuksen määrä kehittyy yhdestä, kahdesta, kahdeksasta ja kuusikymmenestä neljästä (1 + 2 + 8 + 64). On selvää, että se on 75. Kokeile sitä itse määrittääksesi, mikä numero vastaa sen binääritietuetta 10110011. Dekooderi sisältää peräkkäisen koodin muuntimen yhdensuuntaiseksi (kuvio 4.7), jonka lähdöt ja nollat \u200b\u200bnäytetään, mitkä vastaa hyväksyttyä koodin yhdistelmää. Jokainen yksikkö (nykyinen impulssi) siirtyy summan sisäänpääsyyn, jossa paino on 2 K. aika. Adderin tuotoksessa on pulssi, jonka amplitudi määritetään koodin yhdistelmällä dekooderin tuloon. Esimerkiksi koodin yhdistelmän 0100110 siirretään summaimen ensimmäiseen, neljään, viidenteen ja seitsemänteen sisääntuloon, jännitettä ei toimiteta (vapaa pulssit) ja toisella, kolmannella ja kuudeksi tulolla jännite toimitetaan, mikä kasvaa 2 1, 2 2 ja 2 5 kertaa vastaavasti. Adderin tuotoksessa on jännite, verrannollinen 2 1 + 2 2 + 2 5 \u003d 38, ts. Kvantisoitu AIM-signaali. Seuraavassa vaiheessa on välttämätöntä saada jatkuva virta laskentavirran arvoista. Se tekee tämän tavallisen lauhduttimen pienen kapasiteetin, mikä on lyhyen aikavälin altistuminen, nykyinen (eli laskentaarvo) ladataan välittömästi ja pitää latauksen seuraavaan lyhytaikaiseen vaikutukseen saakka. Huomaa jälleen kerran, että jatkuva nykyinen käyrä on jonkin verran erilainen kuin mikrofonin päätelaitteissa saadut tiedot: sillä on tasaiset vaiheet määrät. Voidaan sanoa, että laskenta-arvojen ja jatkuvan mikrofonin virran käyrän myöhempää palauttamista koskeva prosessi seuraa erityisiä vääristymiä, jotka voivat vaikuttaa äänen toistoon. Käytännössä ei kuitenkaan ole lauhduttimia palauttamaan virtalähteitä, mutta monimutkaisempia järjestelmiä, jotka muodostavat pienemmän virran muodon, joka on samanlainen kuin lähdevirran muoto ja siten määritettyjä vääristymiä.
Ohjauskysymykset
1. Mikä on digitaalinen signaali?
2. Mikä taajuus on analoginen signaali diskred?
3. Kuinka määrittää signaalin kvantisointivirhe?
4. Mikä on binaarisen signaalin periaate?
5. Kuinka palauttaa analoginen signaali digitaalisesta?
Bibliografia
1. Cruk B.I., Popov G.N. ... ja maailma on salaperäinen verhojen lukujen takana: digitaalinen viestintä. - 2. toimita, laki. - Novosibirsk: Ceris, 2001. - 264 s.
2. Bakalov V.P., Dmitrikov V.F., Kruk B.I. Ketjun teorian perusteet: yliopistojen oppikirja; Ed. V.p. Bakalov. - M. Radio ja viestintä, 2000. - 592 s.
3. Zhuraveva OB, Krook B.I. Diskreetti signaalit ja ketjut: 26 Kysymyksiä ja vastauksia: Tutorial etäopiskeluun. - Novosibirsk: Sibguti, 1999. - 100 s.
Analogiset digitaaliset muuntimet (ADC)- Nämä ovat laitteita, jotka on tarkoitettu analogisten signaalien muuntamiseen digitaaliksi. Tällaiseen muuntamiseen on tarpeen kvantisoida analoginen signaali, ts. Analogisen signaalin välittömät arvot tiettyjen kvantisointitasojen määrittämiseksi.
Ihanteellisen kvantisoinnin ominaisuutta katsotaan kuviossa 2 3.92.
Kvantisointi on pyöristetty analoginen arvo lähimpään kvantisointiin, ts. Suurin kvantisointivirhe on ± 0,5 h (H on kvantisointivaihe).
ADC: n tärkeimmät ominaisuudet ovat päästöjen lukumäärä, muutoksen aika, epälineaarisuus jne. Päästöjen määrä on analogisen arvoon liittyvien koodinpäästöjen määrä, jonka ADC voi tuottaa. Usein puhua ADC: n resoluutiosta, joka määräytyy ADC-tuotoksen koodiyhdistelmien enimmäismäärän vastaisesti. Siten 10-bittinen ADC on resoluutio (2 10 \u003d 1024) -1, ts. Kun ADC-asteikko vastaa 10B, kvantisointivaiheen absoluuttinen arvo ei ylitä 10 Mt: tä. Muunnosaika T PP - Aikaväli määritetyn signaalin muutoksesta ADC-tuloon, kunnes vastaava stabiili koodi näkyy sen ulostulossa.
Ominaisuudet muuntamismenetelmät ovat seuraavat: analogisen arvon ja peräkkäisen muuntamisen rinnakkainen muuntaminen.
ADC rinnakkain tulon analogisen signaalin muuntaminen
Rinnakkaismenetelmällä syöttöjännitettä verrataan samanaikaisesti N-referenssijännityksiin ja määrittää, minkä välillä kaksi tukevaa rasitusta se on. Tällöin tulos saadaan nopeasti, mutta järjestelmä on melko monimutkainen.
ADC: n toimintaperiaate (kuva 3.93)
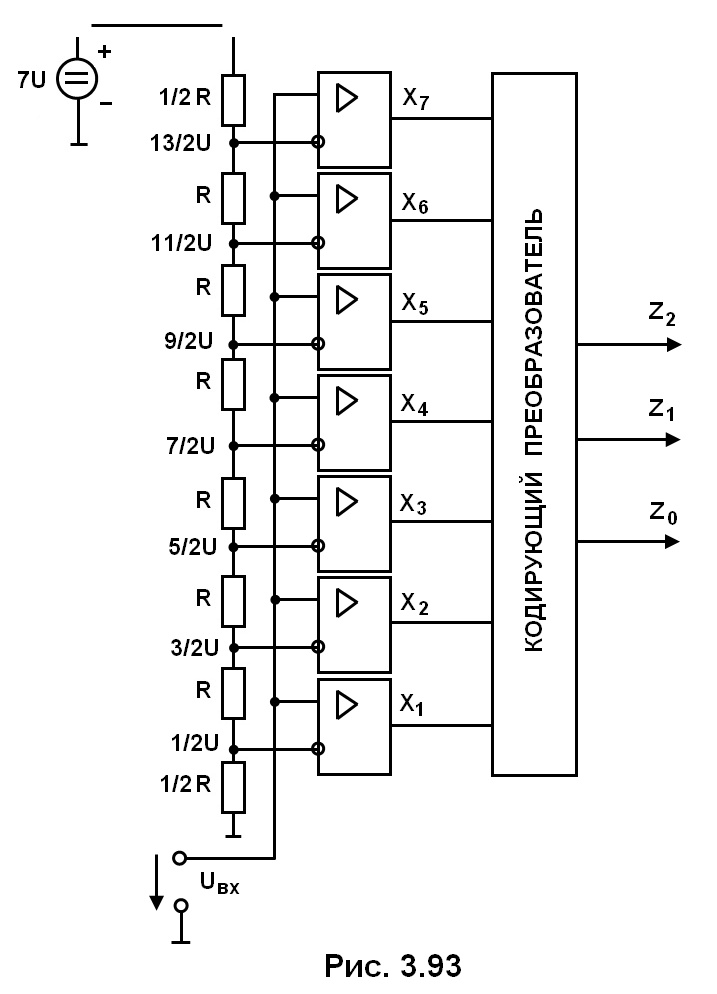
U in \u003d 0, koska kaikki ou jänniteero (U + - U -)< 0 (U + , U − - напряжения относительно общей точки соответственно неинвертирующего и инвертирующего входа), напряжения на выходе всех ОУ равны −Е пит а на выходах кодирующего преобразователя (КП) Z 0 , Z 1 , Z 2 устанавливаются нули. Если U вх > 0.5u, mutta alle 3/2U, vain alemman OE: n (U + - U -)\u003e 0 ja vain sen tuottamisessa, on jännite + e kuoppa, joka johtaa seuraavien signaalien ulkoasuun lähdössä: z 0 \u003d 1, z 2 \u003d z l \u003d 0. Jos U VH on\u003e 3 / 2U, mutta alle 5/2U, sitten näiden kahden alemman käyttöjärjestelmän lähtöön tulee myös jännite, joka johtaa ulkonäköön CP-koodin 010 ja niin edelleen.
Katso mielenkiintoinen video ADC: n työstä:
ADC: n peräkkäin tulosignaalin peräkkäin
Tämä on peräkkäinen tilin ADC, jota kutsutaan ADC: llä valvontayhteyksellä (kuva 3.94). 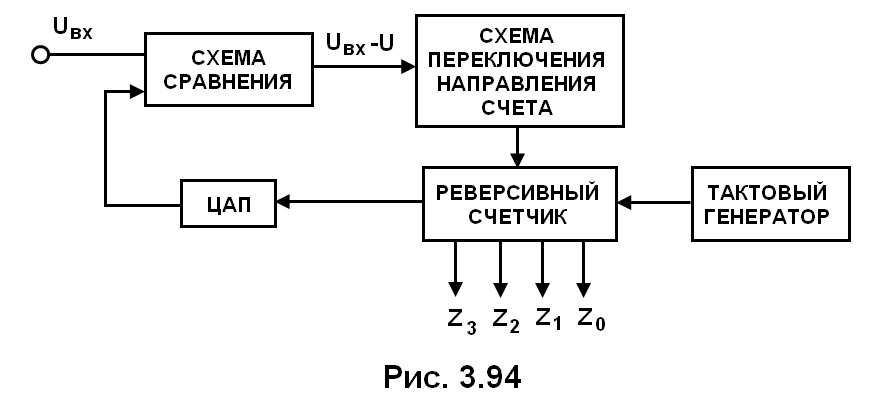 DAC: n ja kääntölaskurin käyttämänä olevan tyyppisen ADC: n avulla signaali, josta saadaan aikaan muutos jännitteessä DAC: n tuotoksessa. Järjestelmän asetus on sellainen, että rasitusten likimääräinen tasa-arvo UH: n syöttössä UH: n ja DAC-tuulen tuotoksessa. Jos syöttöjännite U VK on suurempi u DAC: n ulostulossa, mittari käännetään suoraan tiliin ja koodi sen ulostulossa kasvaa, mikä lisää jännitteen DAC: n poistumisessa. Tasa-arvon aikana UH ja U tili pysähtyy ja syöttöjännitteen mukainen koodi poistetaan kääntömittarin vapautumisesta.
DAC: n ja kääntölaskurin käyttämänä olevan tyyppisen ADC: n avulla signaali, josta saadaan aikaan muutos jännitteessä DAC: n tuotoksessa. Järjestelmän asetus on sellainen, että rasitusten likimääräinen tasa-arvo UH: n syöttössä UH: n ja DAC-tuulen tuotoksessa. Jos syöttöjännite U VK on suurempi u DAC: n ulostulossa, mittari käännetään suoraan tiliin ja koodi sen ulostulossa kasvaa, mikä lisää jännitteen DAC: n poistumisessa. Tasa-arvon aikana UH ja U tili pysähtyy ja syöttöjännitteen mukainen koodi poistetaan kääntömittarin vapautumisesta.
Sekvenkinen muuntomenetelmä toteutetaan ADC-aikamuunnossa (ADC, jossa on lineaarisesti muuttuvan jännitteen (savi) generaattori).
ADC: n toimintaperiaate. 3.95) Perustuu pulssien lukumäärän laskemiseen ajanjaksolla, jonka aikana lineaarisesti muuttuva jännite (LIN), joka kasvaa nollan arvosta, saavuttaa syöttöjännitteen U W. Seuraavaa merkintää käytetään: CC - Vertailujärjestelmä, GI - Pulse Generator, CL - elektroninen avain, SC - Pulssimittari. 
Ajan T: n aikakaaviossa mainittu aika vastaa syöttöjännitteen mittauksen alkua ja aika T2 vastaa syöttöjännitteen ja vuorausjännitteen tasa-arvoa. Mittausvirhe määräytyy ajan kvantisointivaiheen mukaan. Cl-näppäin yhdistää pulssin generaattorin laskuriin mittauksen alusta, kunnes U VX ja U-savi tasavertaisiin tasa-arvoon. U: n kautta U SCH merkitsi jännite mittarin tuloon.
Laskurin ulostulon koodi on verrannollinen tulojännitteeseen. Yksi tämän järjestelmän puutteista on pieni nopeus.

ADC kaksinkertaisella integraatiolla
Tällainen ADC toteuttaa tulosignaalin peräkkäisen muuntomenetelmän (kuvio 3.96). Seuraavaa merkintää käytetään: SU - Ohjausjärjestelmä, GI - Pulse Generator, SC - Pulssilaskuri. ADC: n toimintaperiaate koostuu kahden ajanjakson suhde määritettäessä jonkin verran integraattorin UB: n syöttöjännite (jännite U ja integraattorin tuotos, joka vaihtelee nollasta suuruusluokan enimmäisarvo) ja seuraavassa - vertailujännitteen U op (u ja vaihtelee suurimmasta modulosta nollaan) (kuva 3.97). 
Let T 1 T 1 integroimalla tulosignaalin jatkuvasti, sitä suurempi aika T-T2 (pituus on aika, jonka aikana vertailujännite on integroitu), sitä suurempi syöttöjännite. S S-avain on suunniteltu asettamaan integraattorin alkuperäiseen nollatilaan. Ensimmäisessä määritetyssä aikasegmenteissä avain 1 on suljettu, avain 2 avautuu ja toisella segmentillä niiden tila on taaksepäin määritetyn suhteen. Samanaikaisesti avaimen sulkemisen kanssa 2 pulssia Gi-generaattorista alkaa saapua SU Control Circricin kautta tilille.
Näiden pulssien vastaanotto päättyy, kun integraattorin lähtöjännite muuttuu nollaksi.
Jännite integraattorin ulostulon jälkeen aika T: n segmentin jälkeen määräytyy ilmaisulla
U ja (t 1) \u003d - (1 / RC) · T1 ∫ 0 U DT \u003d - (u · t 1) / (r · c)
Käyttämällä samanlaista ilmaisua T2: n pituudelle, saamme
t 2 \u003d - (R · C / U OP) · U ja (T 1)
Korvaa täältä ekspressio u ja (t 1), saamme t 2 \u003d (u vx / u op) · t 1 mistä u vh \u003d u oa · t 2 / t 1
Mittarin tuotoksen koodi määrittää syöttöjännitteen suuruuden.
Yksi tarkasteltavana olevan tyyppihyväksynnän tärkeimmistä eduista on korkea melun immuniteetti. Lyhyessä ajassa esiintyvät satunnaiset päästöt ovat käytännössä vaikuttaneet muuntamisvirheeseen. ADC: n puute on pieni nopeus.
Yleisimpiä ovat ADC-sarja mikrokuitujen 572, 1107, 1138 jne. (Taulukko 3.3)  Taulukossa esitetään, että paras nopeus on ADC-rinnakkainen transformaatio ja pahin on peräkkäisen muuntamisen ADC.
Taulukossa esitetään, että paras nopeus on ADC-rinnakkainen transformaatio ja pahin on peräkkäisen muuntamisen ADC.
Tarjoamme nähdä toisen arvoisen videon työstä ja ADC-laitteesta:
Tässä artikkelissa käsitellään eri tyyppisten ADC: n toimintaperiaatteen tärkeimpiä kysymyksiä. Samanaikaisesti analogisen digitaalisen muutoksen matemaattiseen kuvaukseen liittyvät tärkeät teoreettiset laskelmat pysyivät artikkeleiden ulkopuolelle, mutta viittaukset antavat, että kiinnostunut lukija voi havaita ADC-työn teoreettiset näkökohdat. Näin ollen artikkeli koskee suurempaa ymmärrystä ADC: n toiminnan yleisistä periaatteista kuin heidän työnsä teoreettinen analyysi.
Johdanto
Lähtökohtana määritämme analogisen digitaalisen muunnoksen. Analoginen digitaalinen muuntaminen on prosessi, jossa tulosi fyysinen arvo on numeeriseen esitykseen. Analog-to-Digital Converter on laite, joka suorittaa tällaisen muunnos. Muodollisesti ADC: n syöttöarvo voi olla mikä tahansa fyysinen arvo - jännite, virta, vastus, säiliö, pulssiprosentti, akselin kiertokulma jne. Kuitenkin varmuutta, tulevaisuudessa ADC: n alla ymmärrämme yksinomaan muuntimen jännitteen koodi.
Analogisen ja digitaalisen muuntamisen käsite liittyy läheisesti mittauksen käsitteeseen. Mittaus ymmärretään mitatun arvon vertaamalla tietyn standardin kanssa analoginen ja digitaalinen konversio, vertaamalla syöttöarvoa tietyllä viitearvolla (yleensä vertailujännitteellä). Siten analogista digitaalista muuntamista voidaan pitää tulosignaalin arvon mittaamisena ja kaikki metrologian käsitteet soveltuvat siihen, kuten mittausvirheitä.
ADC: n tärkeimmät ominaisuudet.
ADC: llä on paljon ominaisuuksia, joista tärkein muuntotaajuus voidaan kutsua. Muunnon taajuus ilmaistaan \u200b\u200btavallisesti näytteissä sekunnissa (näytteet sekunnissa, SPS), purkaus - bitteissä. Moderneilla ADC: llä voi olla hieman jopa 24 bittiä ja muunnoksenopeus GSPS-yksiköihin (tietenkin, ei samanaikaisesti). Mitä korkeampi nopeus ja purkaus, vaikeampi on saada tarvittavat ominaisuudet, kalliimpi ja monimutkaisempi muunnin. Transformaatio ja bittinopeus liittyvät toisiinsa tietyllä tavalla, ja voimme kasvattaa konversiota, nopeuden uhraamista.
ADC-tyypit
On olemassa monenlaisia \u200b\u200bADC-tyyppisiä, mutta tämän artiklan puitteissa rajoitamme itsemme harkitsemaan vain seuraavia tyyppejä:
- ADC-rinnakkaismuoto (suora muuntaminen, flash ADC)
- ADC johdonmukainen lähentäminen (SAR ADC)
- delta Sigma ADC (ADC veloittamalla)
Suurin nopeus ja alin purkaus on ADC Direct (rinnakkainen) muuntaminen. Esimerkiksi Texas Instruments TLC5540 yhdensuuntainen transformaatio ADC on 40msp: n nopeus hieman vain 8 bittiä. Tämäntyyppisen ADC voi olla muunnoksen nopeus jopa 1 GSPS. Täällä voidaan huomata, että kuljettimen ADC: t (putki ADC) on vielä suurempi nopeus, mutta ne ovat useiden ADC: n yhdistelmä, jolla on vähemmän nopeus ja niiden huomioon ottaminen on tämän artiklan soveltamisalan ulkopuolella.
Keskimmäisen kapean useissa purkausnopeudessa on ADC johdonmukaisen lähentämisen ADC: ssä. Tyypilliset arvot ovat hieman 12-18 bittiä 100SP-1MSPS-muunnostaajuudella.
Suurin tarkkuus saavuttaa Sigma-Delta ADC: n, jolla on hieman jopa 24 bittiä osallistavaa ja nopeutta SPS-yksiköistä KSPS-yksiköihin.
Toinen ADC-tyyppi, joka otettiin käyttöön viime aikoina, on integroitu ADC. ADC: n integrointi ovat lähes kokonaan syrjäyttäneet muut ADC-tyypit, mutta ne voivat tavata vanhoja mittauslaitteita.
ADC: n suora muuntaminen
Suora muunnos ADC jaettiin laajasti 1960-1970, ja alkoi tehdä integroidun piirin muodossa 1980-luvulla. Niitä käytetään usein osana "kuljettimen" ADC: tä (tässä artikkelissa ei oteta huomioon), ja niillä on hieman 6-8 bittiä jopa 1 GSP: n nopeudella.
Suoran muunnos ADC: n arkkitehtuuri on esitetty kuviossa 2. yksi
Kuva. 1. ADC: n suoran muuntamisen rakenteellinen kaavio
ADC: n toimintaperiaate on äärimmäisen yksinkertainen: tulosignaali tulee samanaikaisesti kaikkiin vertailukohteiden "positiivisiin" tuloihin ja useisiin rasituksiin, jotka on saatu viitteestä jakamalla vastukset R. kuvion 2 piirissä. 1 Tämä sarja on näin: (1/16, 3/16, 5/16, 7/16, 9/16, 11/16, 13/16) UREF, jossa UREF on ADC: n tukijännite.
Oletetaan ADC-merkinnälle, jännite toimitetaan 1/2 uref. Sitten ensimmäiset 4 vertailut toimivat (jos lasket alla) ja loogiset yksiköt näkyvät niiden lähdöissä. Priority Encoder (prioriteettikooderi) muodostaa binäärikoodin yksiköiden "sarakkeesta", joka on vahvistettu lähtörekisterin avulla.
Nyt tällaisen muuntimen edut ja haitat ovat selkeitä. Kaikki vertailut toimivat rinnakkain, järjestelmän viiveaika on yhtä suuri kuin viiveaika yhdessä vertailussa ja viiveaika kooderissa. Vertailu ja kooderi voidaan tehdä erittäin nopeasti, minkä seurauksena koko järjestelmällä on erittäin nopea.
Mutta n päästöjen hankkimiseksi 2 ^ n vertailut tarvitsevat (ja kooderin monimutkaisuus kasvaa myös 2 ^ n). KUVA. 1. Sisältää 8 vertailua ja sillä on 3 päästöjä 8 päästöjen saamiseksi, 256: n vertailua, 10 päästöjä - 1024 vertailua varten olisi yli 16 miljoonaa 24-bittisiä mainoksia. Tällaiset korkeudet eivät ole vielä saavuttaneet.
ADC johdonmukainen lähentäminen
Analoginen digitaalinen muunnin (SAR, peräkkäiset lähentämisrekisteri) mittaa tulosignaalin suuruuden, joka suorittaa useita peräkkäistä "punnitusta", eli tulojännitteen arvon vertailut, joiden syntyy useita arvoja seuraavasti:
1. Ensimmäisessä vaiheessa sisäänrakennetun digitaalisen analogisen muuntimen tuotoksessa on asetettu arvo 1 / 2uref (täältä ja oletamme, että signaali on aikavälillä (0 - UREF).
2. Jos signaali on suurempi kuin tämä arvo, sitä verrataan jännitteeseen, joka sijaitsee jäljellä olevan aikavälin keskellä, ts. Tässä tapauksessa 3 / 4UREF. Jos signaali on pienempi kuin asetettu taso, seuraava vertailu tehdään alle puolet jäljellä olevasta aikavälillä (ts. Taso 1 / 4UREF).
3. Vaihe 2 toistetaan n kertaa. Niinpä N: n vertailu ("punnitus") tuottaa tuloksen n bittiä.
Kuva. 2. ADC-sekvenssin approksimaation rakenteellinen kaavio.
Siten peräkkäisen lähentämisen ADC koostuu seuraavista solmuista:
1. Vertailu. Se vertaa syöttöarvoa ja "painon" jännitteen (kuviossa 2. merkitty kolmio).
2. Digitaalinen analoginen muunnin (DAC). Se tuottaa "painon" jännitteen arvon, joka perustuu digitaalisen koodin tuloon.
3. peräkkäinen lähentämisrekisteri, SAR-rekisteri. Se suorittaa peräkkäisen lähentämisen algoritmin, joka tuottaa DAC-tuloon syötetyn nykyisen koodin arvon. Hänen nimensä mukaan kaikki ADC: n arkkitehtuuri on nimetty.
4. Näytteen säilytysjärjestelmä (näyte / pidä, S / H). Se on pohjimmiltaan tärkeä tämän ADC: n toiminnan kannalta, että syöttöjännite ylläpitää jatkuvaa arvoa koko muuntamisjakson aikana. Kuitenkin "todellisilla" signaaleilla on omaisuus muuttaa ajan myötä. Varastointipiiri "muistaa" analogisen signaalin nykyisen arvon ja säilyttää sen muuttumattomana koko laitteen koko käyttöjakson ajan.
Laitteen etu on suhteellisen korkea transformaatioaste: N-bittin ADC: n muunnosaika on n kellot. Muunnon tarkkuus rajoittaa sisäisen DAC: n tarkkuudella ja voi olla 16-18 bittiä (24-bittinen SAR-ADCS, esimerkiksi AD7766 ja AD7767).
Delta Sigma ADC
Ja lopuksi mielenkiintoisin ADC-Sigma-Delta ADC: n, jota kutsutaan toisinaan ADC: n kirjallisuudesta veloituksella. Sigma Delta ADC: n rakennejärjestelmä on esitetty kuviossa 2. 3.
Kuva 3. Sigma Delta ADC: n rakennejärjestelmä.
Tämän ADC: n toimintaperiaate on jonkin verran monimutkaisempi kuin muut ADC-tyypit. Sen ydin on, että syöttöjännitettä verrataan integraattorin kerääntyneeseen jännitearvoon. Integraattorin tulo toimitetaan positiivisilla tai negatiivisilla napaisuuspulsseilla vertailun tuloksesta riippuen. Näin ollen tämä ADC on yksinkertainen seurantajärjestelmä: jännite integraattorin "Tracks" -lähtöön tulosijännitteen (kuva 4). Tämän järjestelmän tulos on nollien ja yksiköiden virtaus vertailijan tuotoksessa, joka sitten siirretään digitaalisen FGH: n kautta, tuloksena saadaan N-bittinen tulos. FRX kuv. 3. Yhdessä "Decimator" -laitteen kanssa laite, joka vähentää näytteiden taajuutta "harvennuksella".
Kuva. 4. Sigma-Delta ADC seurantajärjestelmänä
Esityksen tiukan vuoksi on sanottava, että kuviossa 2 on sanottava. Kuvio 3 esittää ensimmäisen tilauksen ADC: n Sigma-Delta-lohkokaavion. Sigma-Delta ADC: n toisessa järjestyksessä on kaksi integraattoria ja kaksi palautekirjaa, mutta sitä ei oteta huomioon täällä. Olet kiinnostunut tästä aiheesta voi viitata.
Kuviossa 1 Kuvio 5 esittää signaaleja ADC: lle nollatasolla tuloaukossa (ylhäältä) ja VREF / 2-tasolla (pohja).
Kuva. 5. Signaalit ADC: ssä tulosignaalin eri tasoilla.
Nyt ilman monimutkaisen matemaattisen analyysin syventämistä yritämme ymmärtää, miksi Sigma Delta ADC: llä on hyvin alhainen oma melu.
Tarkastellaan kuviossa 2 esitetyn modulaattorin Sigma-delta. 3 ja kuvittele se tässä muodossa (kuva 6):
Kuva. 6. Sigma Delta -modulaattorin rakenteellinen järjestelmä
Tässä vertailija esitetään ylläpitäjänä, joka tiivistää jatkuva käyttökelpoinen signaali ja kvantisointikohina.
Oletetaan, että integraattorilla on 1 / s vaihteisto. Sitten, edustaa käyttökelpoisen signaalin X (S), modulaattorin Sigma Delta Koska Y (S) ja kvantisointikohtaan E (S), saamme ADC-vaihteiston suhde:
Y (S) \u003d X (S) / (S + 1) + E (S) S / (S + 1)
Toisin sanoen Sigma Delta -modulaattori on alhainen taajuussuodatin (1 / (s + 1)) hyödylliselle signaalille ja suurtaajuussuodattimella (S / (S + 1)) kohinaa varten ja molemmilla suodattimilla on sama rajataajuus . Digitaalinen FNH poistetaan helposti spektrin suurtaajuusalueelle, joka seisoo modulaattorin jälkeen.
Kuva. 7. Melun "siirtymisen" ilmiö spektrin suurtaajuusosassa
On kuitenkin ymmärrettävä, että tämä on äärimmäisen yksinkertaistettu selitys Sigma Delta ADC: n melun siirtymisen ilmiöstä.
Joten Sigma Delta ADC: n tärkein etu on suuri tarkkuus johtuen äärimmäisen alhaisen tason omasta melusta. Korkean tarkkuuden saavuttamiseksi on kuitenkin välttämätöntä, että digitaalisen suodattimen leikkaustaajuus voi olla mahdollisimman alhainen, monta kertaa pienempi kuin modulaattorin Sigma Delta. Siksi Sigma Delta ADC: llä on alhainen transformaatioaste.
Niitä voidaan käyttää äänilaitteissa, mutta tärkein käyttö löytyy teollisesta automaatiosta anturin signaalien muuntamiseksi mittauslaitteissa ja muissa sovelluksissa, joissa tarvitaan tarkkaa tarkkuutta. Mutta ei vaadita nopeita.
Vähän historiaa
Vanhin maininta ADC: stä historiassa on luultavasti Paul M. Rainey, "FACSIMILE TELEGRAPH SYSTEM, USA Patenttijulkaisu 1,608,527, jätetty 20. heinäkuuta 1921, julkaistiin 30. marraskuuta 1926. Patentissa kuvattu laite on itse asiassa 5-bittinen ADC-suora muuntaminen.
Kuva. 8. Ensimmäinen patentti ADC: lle
Kuva. 9. Suora muunnokset ADC (1975)
Kuviossa oleva laite on ADC Direct Conversion MOD-4100, joka on tuotettu tietokone laboratorioilla, 1975 vapauttamalla, joka on koottu erillisten vertailijoiden perusteella. Vertailijat 16 kpl (ne sijaitsevat puoliympyrässä, jotta signaalin etenemisen viivästyminen kussakin vertailiutomaa varten), joten ADC: llä on vähän kaikkia 4 bittiä. MSPS-transformaation nopeus, 14 watin virrankulutus.
Seuraavassa kuvassa näkyy ADC: n suoran muuntamisen edistynyt versio.
Kuva. 10. Suora muunnos ADC (1970)
Tietokoneen laboratorioiden VHS-630: n laite sisälsi 64 vertailua, oli hieman 6 bittiä, nopeus 30mms ja kulutettiin 100 wattia (versio 1975 VHS-675 oli nopeus 75 MSP: tä ja 130 watin kulutusta ).
Kirjallisuus
W. Kester. ADC-arkkitehtuurit i: Flash Converter. Analogiset laitteet, MT-020-opetusohjelma.