Het principe van DAC-constructie. Digitaal-naar-analoog-omzetter
Digitaal-naar-analoog-omzetter(DAC) - een apparaat dat de invoer omzet digitaal signaal(code) naar analoog.
DAC wordt waar nodig veel gebruikt digitale informatie, uitgegeven door de computer, besturen analoge apparaten, bewegen bijvoorbeeld een klep die proportioneel is aan de berekende waarde van het digitale signaal. DAC's worden gebruikt om computers (DC's) te coördineren met analoge apparaten, als interne componenten van ADC's en digitale meetinstrumenten. Als onderdeel van analoog-naar-digitaal-omzetters dient de DAC voor het genereren van analoog signaal(stroom of spanning) waarmee het geconverteerde signaal wordt vergeleken.
Het belangrijkste kenmerk van de DAC is de resolutie, bepaald door het aantal bits N. Theoretisch gezien een DAC die converteert N-bit binaire codes, moeten 2 bevatten N verschillende betekenissen uitgangssignaal met resolutie (2 N – 1)-1. Absolute waarde het minimale uitgangsspanningsquantum wordt bepaald als het maximaal geaccepteerde getal 2 N– 1, en de maximale uitgangsspanning van de DAC, de zogenaamde schaalspanning U school Met 12 bits is het aantal onafhankelijke quanta (stappen) van de DAC-uitgangsspanning dus 212 – 1 = 0,0245%. Referentie-geselecteerde schaalspanning U shk = 10B, gedeeld door dit aantal quanta, geeft de absolute resolutie van de DAC
D X = U shk/(2 N– 1) = 103 mV/ (212 – 1) = 2,45 mV.
Conversiekenmerk(HP) DAC– reeks waarden van de analoge uitvoerhoeveelheid xi afhankelijk van de invoercode b i.
De conversiekarakteristiek (of overdrachtskarakteristiek) van de DAC wordt getoond in Fig. 3.15.
Rijst. 3.15. DAC-overdrachtskarakteristiek; A– lineariteit; B– niet-lineariteit; C– niet-monotoniciteit; D– uitgangssignaal; E– een rechte lijn die de ideale waarden van de uitgangssignaalniveaus verbindt; dпш – volledige fout
Het verschil tussen de werkelijke resolutiewaarde en de theoretische waarde is te wijten aan de fouten van de knooppunten en de ruis van de DAC. De nauwkeurigheid van de DAC wordt bepaald door de waarden van de absolute fout van het apparaat, niet-lineariteit en differentiële niet-lineariteit.
De absolute fout dshk vertegenwoordigt de afwijking van de waarde van de uitgangsspanning (stroom) van de nominale berekende waarde die overeenkomt met het eindpunt van de conversiekarakteristiek (zie Fig. 3.15). Absolute fouten worden gewoonlijk gemeten in eenheden van het minst significante cijfer (LSB).
Niet-lineariteit dl karakteriseert de identiteit van de minimale stappen van het uitgangssignaal over het gehele conversiebereik en wordt gedefinieerd als de grootste afwijking van het uitgangssignaal van een rechte lijn met absolute nauwkeurigheid getrokken door nul en punt maximale waarde uitgangssignaal. De niet-lineariteitswaarde mag de ±0,5 MZ-eenheid niet overschrijden.
Differentiële niet-lineariteit dl.dif karakteriseert de identiteit van aangrenzende signaalincrementen. Het wordt gedefinieerd als het minimale verschil in de niet-lineariteitsfout van twee aangrenzende quanta in het uitgangssignaal. De waarde van de differentiële niet-lineariteit mag niet groter zijn dan tweemaal de waarde van de niet-lineariteitsfout. Als de waarde van dl.dif groter is dan één MZR, wordt de omzetter als niet-monotoon beschouwd, d.w.z. aan de uitgang kan het uitgangssignaal niet uniform toenemen met een uniforme toename van de ingangscode.
Niet-monotoniciteit in sommige quanta resulteert in een afname van het uitgangssignaal naarmate de ingangscode toeneemt.
Hardwarefout bepaald door broninstabiliteit referentie spanning, de fout van schakelaars, resistieve matrices en operationele uitgangsversterkers wordt instrumentele fout genoemd. De belangrijkste factoren die elementfouten veroorzaken zijn: technologische variatie in parameters; impact van veranderingen omgeving(voornamelijk temperatuur); veranderingen in parameters in de loop van de tijd (veroudering); blootstelling aan externe en interne ruis en interferentie.
Alle instrumentele fouten manifesteren zich voornamelijk in de volgende vormen:
a) nul-offset, die de parallelle verschuiving van de DAC-overdrachtskarakteristiek ten opzichte van de gemiddelde rechte lijn karakteriseert (veroorzaakt door de nul-offsetspanning en de niet-nul ingangsstroom van de op-amp, evenals de resterende parameters van de schakelaars) ;
b) veranderingen in de transmissiecoëfficiënt, die de afwijking van de helling van de werkelijke transmissiekarakteristiek ten opzichte van de gemiddelde rechte lijn karakteriseert;
c) afwijkingen van de overdrachtskarakteristiek van de omzetter ten opzichte van de ideale rechte lijn (een dergelijke niet-lineariteit van de conversie manifesteert zich als niet-identieke toenames van het uitgangssignaal als functie van de ingangscode).
NAAR dynamische kenmerken De DAC omvat timingparameters en maximale conversiefrequentie.
Timingparameters bepalen de snelheid van de converters. Er zijn drie tijdparameters: kwantiseringsstap (periode) D T, conversietijd (bezinkingstijd van het uitgangssignaal) T pr, duur van de conversiecyclus T C.
Kwantiseringsstap (periode) D T– tijdsinterval tussen twee opeenvolgende transformaties. De inverse waarde van de kwantiseringsperiode 1/D T = F kV wordt de kwantiseringsfrequentie genoemd.
Insteltijd DAC-uitgang T pr – tijd vanaf het moment dat de code verandert bij de DAC-ingangen tot het moment waarop de waarde van de analoge uitgangswaarde met een bepaalde waarde verschilt van de vastgestelde waarde (Fig. 3.16).

Rijst. 3.16. Definitie van tijd T pr DAC-conversie
Conversiecyclustijd T ts – tijd tussen het moment van indiening van de invoercode en de uitgifte van het analoge uitgangssignaal ( T ts = T pr). Het wordt voornamelijk bepaald door cyclogrammen en timingdiagrammen die de werking beschrijven van informatie- en computerapparatuur en -systemen met bestaande converters.
Maximale conversiefrequentie – hoogste frequentie sampling, waarbij de DAC-parameters overeenkomen met de opgegeven waarden.
De werking van de DAC gaat vaak gepaard met specifieke transiënte pulsen, dit zijn scherpe pieken met een grote amplitude in het uitgangssignaal, die ontstaan als gevolg van het verschil in de openings- en sluitingstijden van de analoge schakelaars in de DAC. Uitschieters zijn vooral duidelijk wanneer een eenheid, in plaats van een nul in het meest significante cijfer en enen in de lagere cijfers van de code, het meest significante cijfer (MSB) invoert en de code in de LSB “allemaal nullen” is. Als de invoercode 011...111 bijvoorbeeld wordt vervangen door code 10...000, en de sleutel van de hogere DAC opent later dan de sleutels van de lagere sluiten, dan is een toename van het uitgangssignaal met slechts één quantum kan gepaard gaan met een puls met een amplitude van 0,5 U school De duur van deze piek komt overeen met de vertraging in de verandering in de status van de sleutels.
Momenteel worden, afhankelijk van de parameterwaarden, precisie- en hogesnelheids-DAC's onderscheiden. Precisie-DAC's hebben dl = 0,1%, en snelle DAC's T mond = 100 ns.
DAC– digitaal-naar-analoog-omzetters – apparaten die zijn ontworpen om een discreet (digitaal) signaal om te zetten in een continu (analoog) signaal. De conversie wordt uitgevoerd in verhouding tot de binaire code van het signaal.
DAC-classificatie
Op type uitgangssignaal: met stroomuitgang en spanningsuitgang;
Op type digitale interface: Met seriële ingang en met parallelle invoer van de invoercode;
Door het aantal DAC's op de chip: enkelkanaals en meerkanaals;
Door snelheid: gematigde snelheid en hoge snelheid.
Basis DAC-parameters:
1. N – bitdiepte.
2. Maximale uitgangsstroom.
4. De grootte van de referentiespanning.
5. Resolutie.
6. Stuurspanningsniveaus (TTL of CMOS).
7. Conversiefouten (nul-offsetfout bij uitvoer, absolute conversiefout, niet-lineariteit van de conversie, differentiële niet-lineariteit). 8. Conversietijd – het tijdsinterval vanaf het moment dat de code wordt gepresenteerd (verzonden) tot het moment dat het uitgangssignaal verschijnt.
9. Insteltijd analoog signaal
De belangrijkste elementen van de DAC zijn:
Resistieve matrices (een set verdelers met een bepaalde TCR, met een bepaalde afwijking van 2%, 5% of minder) kunnen in de IC worden ingebouwd;
Schakelaars (op bipolaire of MOS-transistors);
Referentie spanningsbron.
Basiscircuits voor het bouwen van een DAC.

21. ADC. Algemene bepalingen. Bemonsteringsfrequentie. ADC-classificatie. Werkingsprincipe van parallelle ADC.
Afhankelijk van de werkingssnelheid zijn ADC's onderverdeeld in:
1. Parallelle conversie-ADC's (parallelle ADC's) - snelle ADC's hebben een complex hardwaregebruik eenheden van GHz.resolutie N = 8-12 bits, Fg = tientallen MHz
2. ADC met opeenvolgende benadering (opeenvolgend tellen) tot 10 MHz. resolutie N = 10-16 bits, Fg = tientallen kHz
3. Integratie van ADC’s van honderden Hz.resolutie N = 16-24 bits, Fg = tientallen
4. Sigma-delta ADC-eenheden MHz.resolutie N = 16-24 bits, Fg = honderden Hz

22. Serieel tellen ADC. Werkingsprincipe.
23. ADC van opeenvolgende benaderingen. Werkingsprincipe.

 Deze code uit de uitgang van de RPP wordt naar de DAC gevoerd, die de bijbehorende spanning 3/4Uinmax produceert, die wordt vergeleken met Uin (op de CC) en het resultaat wordt met de vierde klokpuls naar hetzelfde bit geschreven. Het proces gaat vervolgens door totdat alle cijfers zijn geanalyseerd.
Deze code uit de uitgang van de RPP wordt naar de DAC gevoerd, die de bijbehorende spanning 3/4Uinmax produceert, die wordt vergeleken met Uin (op de CC) en het resultaat wordt met de vierde klokpuls naar hetzelfde bit geschreven. Het proces gaat vervolgens door totdat alle cijfers zijn geanalyseerd.
SAR ADC-conversietijd:
tpr = 2nTG, waarbij TG de pulsherhalingsperiode van de generator is; n – ADC-bitcapaciteit.
Dergelijke ADC's zijn qua snelheid inferieur aan ADC's van het parallelle type, maar ze zijn goedkoper en verbruiken minder stroom. Voorbeeld: 1113PV1.
24. Werkingsprincipe van een integrerend type ADC.
Het werkingsprincipe van een integrerende ADC is gebaseerd op twee basisprincipes:
1. Conversie ingangsspanning in frequentie of duur (tijd) van pulsen
Uin → f (VLF – spanningsfrequentieomvormer)
2. Converteer frequentie of duur (tijd) naar digitale code
f → N; T → N.
De belangrijkste fout wordt veroorzaakt door VLF.
Dit type ADC voert de conversie uit in twee fasen.
In de eerste fase wordt het analoge ingangssignaal geïntegreerd en deze geïntegreerde waarde wordt omgezet in een pulsreeks. De herhalingssnelheid van pulsen in deze reeks of hun duur wordt gemoduleerd door de geïntegreerde waarde van het ingangssignaal.
In de tweede fase wordt deze reeks pulsen omgezet in een digitale code - de frequentie of pulsduur wordt gemeten.
Digitaal-naar-analoog-omzetter (DAC) is ontworpen voor automatische conversie(decoderen) invoergrootheden weergegeven door numerieke codes in hun overeenkomstige waarden van continu variërende, in de tijd variërende (dat wil zeggen analoge) grootheden. Met andere woorden, de DAC voert de tegenovergestelde conversie uit in vergelijking met de ADC. Weekend fysieke hoeveelheden ADC's zijn het vaakst elektrische spanningen en stromingen, maar kunnen ook tijdsintervallen zijn, hoekige bewegingen enz. In een automatiseringssysteem met een computer is het handiger om een digitaal signaal te verwerken (converteren en verzenden), maar het is voor een persoon (operator) vertrouwder en handiger om analoge signalen waar te nemen die overeenkomen met de waarden van numerieke codes. Met behulp van een ADC wordt informatie in een computer ingevoerd en met behulp van een DAC wordt deze door de computer uitgevoerd om het bestuurde object te beïnvloeden en door een persoon te worden waargenomen.
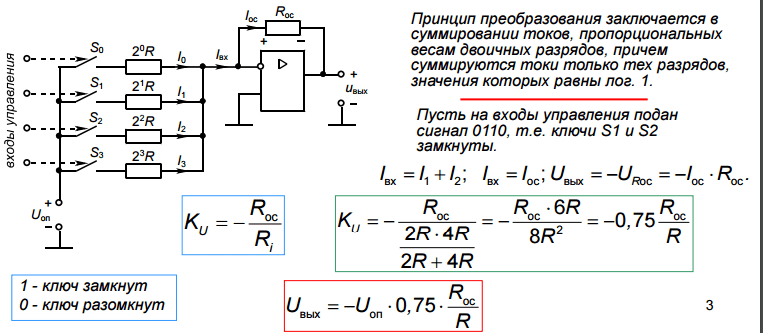
DAC-circuits gebruiken doorgaans een representatie van een binair getal dat uit meerdere cijfers bestaat als een som van machten van 2. Elk cijfer (als het een 1 bevat) wordt omgezet in een analoog signaal dat evenredig is aan het getal 2 tot een macht gelijk aan het cijfergetal. met één verminderd.
In afb. 4.38 getoond eenvoudig circuit Een DAC, waarvan de basis een resistieve matrix is - een reeks weerstanden die zijn verbonden met de ingang van de operationele versterker met toetsen die worden bestuurd door de overeenkomstige bits van een binair getal. Triodes (bijvoorbeeld MOS-transistors) kunnen als schakelaars worden gebruikt. Als er in dit bit een 1 wordt geschreven, is de sleutel gesloten, als er 0 is, is de sleutel open.
De noodzaak om een operationele versterker te gebruiken is te wijten aan het feit dat het uitgangssignaal in de DAC analoog is. Zowel de ingangs- als de uitgangssignalen van de op-amp zijn gelijkspanningen (in de zin van constante polariteit).
De versterking van de operationele versterker is gelijk aan de verhouding van de weerstand van de weerstand R os in het feedbackcircuit naar de weerstand van de weerstand aan de ingang van de versterker, die, zoals blijkt uit Fig. 4.38 heeft elk cijfer zijn eigen betekenis. Overdrachtscoëfficiënten K =-U uit / U op voor elke bit van het geconverteerde binaire getal (als 1 in deze bit is geschreven) zijn respectievelijk gelijk aan: K 0 =R o.s/ R 0 ;K 1 = 2R o.s/ R 0 ;K 2 = 4R o.s/ R 0 ;
K 3 = 8R o.s/ R 0 . DAC-uitgangsspanning
U uit = - U op ( K 3 +K 2 +K 1 + K 0) =
= - U op ( R o.s/ R 0)(8X 3 + 4X 2 + 2X 1 + X 0),
Waar X neemt de waarde 1 of 0 aan, afhankelijk van wat er in een bepaald bit van het binaire getal staat.
Rijst. 4.38. Digitaal-analoog circuit
converter gebaseerd op een resistieve matrix
Zo wordt een viercijferig binair getal omgezet in een spanning U uit, wat 16 mogelijke waarden kan aannemen van 0 tot 15D u kv, waar D u kv - kwantiseringsstap.
Om de kwantiseringsfout te verminderen, is het noodzakelijk om het aantal binaire bits van de DAC te vergroten. Tijdens de productie geïntegreerde schakelingen Met behulp van dit circuit is het erg moeilijk om zeer nauwkeurige weerstanden te maken met weerstanden die tientallen of honderden keren van elkaar verschillen. Bovendien is de belasting van de referentiespanning U op verandert afhankelijk van de staat van de toetsen, dus het is noodzakelijk om een bron met lage interne weerstand te gebruiken.
Het DAC-circuit getoond in Fig. 4.39, is vrij van de aangegeven nadelen. Daarin worden de wegingscoëfficiënten van elk cijfer ingesteld door sequentiële verdeling van de referentiespanning met behulp van een resistieve matrix van het type R- 2R, wat een multi-link spanningsdeler is.
Dit DAC-circuit maakt gebruik van tweestandenschakelaars die weerstanden 2 verbinden R hetzij op de ingang van de operationele versterker (met 1 in dit bit), hetzij op de gemeenschappelijke neutrale draad. De ingangsweerstand van de resistieve matrix is niet afhankelijk van de positie van de toetsen. Transmissiecoëfficiënt tussen buren knooppunten matrix bedraagt 0,5. Uitgangsspanning
U uit = - U op ( R/16R)(X 1 + 2X 2 + 4X 3 + 8X 4).

Rijst. 4.39. Digitaal-naar-analoog omzettercircuit
gebaseerd op resistieve matrix R-2R
De grootste invloed op de DAC-fout wordt uitgeoefend door afwijkingen van de weerstandsweerstanden van hun nominale waarden, en ook door het feit dat een echte schakelaar een weerstand heeft van gesloten staat niet gelijk aan oneindig, maar in de open lucht - niet gelijk aan nul. Geproduceerd resistieve matrices een relatieve fout hebben van ongeveer honderdsten van een procent, d.w.z. zijn zeer nauwkeurig.
4.5.2. Analoog-naar-digitaal-omzetters parallelle codering
Een analoog-digitaalomzetter (ADC) is ontworpen om continu in de tijd variërende (dat wil zeggen analoge) grootheden automatisch om te zetten (meten en coderen) in overeenkomstige numerieke codewaarden. IN in dit geval Het woord “cijfer” betekent binaire code. Als we het hebben over digitale apparatuur voor het opnemen en weergeven van geluid of digitale telefonie, bedoelen we dat een voortdurend veranderend geluidssignaal wordt opgenomen of gedigitaliseerd wordt verzonden, dat wil zeggen: in de vorm van binaire (binaire) codes.
Afhankelijk van de conversiemethode worden ADC's onderverdeeld in serieel, parallel en serie-parallel.
De snelst werkende ADC's zijn van het parallelle type. Ze zetten een analoog signaal in één stap om in code, maar voor dergelijke ADC's zijn meerdere comparatoren nodig. In alle comparatoren met meerdere referentiespanningen wordt de ingangsspanning gelijktijdig vergeleken. Parallelle ADC's hebben dat wel groter aantal elementen dan opeenvolgende.
Laten we eens kijken naar de werking van een parallelle drie-bit
ADC (Afb. 4.40).

Rijst. 4.40. Parallelle drie-bits ADC-schakeling
Drie binaire cijfers kunnen acht getallen vertegenwoordigen - van 0 tot 7. Daarom worden zeven comparatoren gebruikt om de ingangsspanning te vergelijken met referentiespanningen die zijn verkregen met behulp van een weerstandsdeler. Elke comparator verzendt een 0-signaal als de ingangsspanning lager is dan de referentiespanning, en anders een 1-signaal.
De toestanden van de vergelijkers en de overeenkomstige binaire codes worden weergegeven in de tabel. 4.12. De codeconverter produceert een binair getal van drie cijfers. De conversietijd van parallelle ADC's kan enkele tientallen nanoseconden bedragen, wat honderden keren sneller is dan seriële ADC's.
Tabel 4.12
Afhankelijkheid van digitale code van ingangsspanning
| Relatieve ingangsspanningswaarde U=U invoer /U op | Vergelijkingsstatus | Binair codenummer | ||||||||
| U< 0,5 | ||||||||||
| £ 0,5 U< 1,5 | ||||||||||
| £ 1,5 U< 2 ,5 | ||||||||||
| £ 2,5 U < 3,5 | ||||||||||
| £ 3,5 U< 4,5 | ||||||||||
| £ 4,5 U< 5 ,5 | ||||||||||
| £ 5,5 U<6 ,5 | ||||||||||
| £ 6,5 U |
4.5.3. Seriële A/D-converters
In afb. Figuur 4.41 toont een serieel ADC-circuit.

Rijst. 4.41. Analoog-naar-digitaal circuit
seriële converter
Bij het commando “Start” verschijnt de digitale machine doelgroep genereert een reeks binaire getallen die worden toegevoerd aan de ingang van een digitaal-naar-analoog converter DAC die spanning genereert U DAC die overeenkomt met elk binair ingangssignaal. Deze spanning (die voortdurend toeneemt tijdens het werken) doelgroep) wordt geleverd aan een van de comparatoringangen K, waarvan de andere ingang de ingangsspanning ontvangt U ingang De comparator vergelijkt deze twee spanningen en produceert een signaal wanneer ze gelijk zijn. Door dit signaal doelgroep stops, en een binaire code die overeenkomt met U invoer De conversie in een seriële ADC vindt dus stapsgewijs plaats. De uitgangswaarde vindt plaats in afzonderlijke stappen (cycli), d.w.z. benadert consequent de gemeten waarde. Daarom besteden seriële ADC's veel tijd aan elke analoge signaalconversie. Om hun prestaties te verbeteren, wordt de bitsgewijze balanceringsmethode gebruikt. Een diagram dat deze methode illustreert, wordt getoond in Fig. 4.42.

Rijst. 4.42. Analoog-naar-digitaal omzetcircuit
met bit-voor-bit-balancering
De rol van een digitale machine wordt vervuld door een register Rg met klokpulssensor DTI. De uitgangscode wordt gelezen op basis van het signaal van het datagereedheidscircuit SRS, die wordt geleverd wanneer er een signaal arriveert van de comparator K ongeveer gelijke ingangsspanning U ingang en spanning U DAC De werking van de comparator wordt gesynchroniseerd door pulsen DTI Dezelfde pulsen dragen achtereenvolgens de registerbits over Rg naar toestand 1. De overdracht begint vanaf het meest significante bit en de minst significante blijven in toestand 0. In dit geval produceert de DAC de overeenkomstige spanning, die wordt vergeleken in de comparator K met invoer. Als U DAC > U invoer, vervolgens wordt op commando van de comparator het meest significante bit teruggezet naar toestand 0; Als U DAC< U m, dan blijft de meest significante bit 1. Vervolgens wordt de volgende hoogste bit overgebracht naar toestand 1 Rg en de spanningen worden opnieuw vergeleken U DAC en U invoer De cyclus wordt herhaald totdat de gelijkheid van de aangegeven spanningen wordt geregistreerd wanneer een van de cijfers van lage orde wordt overgebracht naar toestand 1. Daarna SRS geeft een signaal om een uitvoercode af te geven. Het aantal vergelijkingscycli in een dergelijke ADC zal gelijk zijn aan het aantal bits van de uitgangscode.
4.6. Programmeerbare logische arrays en geïntegreerde schakelingen
De organisatie van ROM en programmeerbare logische arrays (PLM's) heeft veel gemeen. Laten we aan de hand van een voorbeeld de algemene aanpak voor het construeren van deze schema's identificeren.
Laten we aannemen dat het nodig is om een apparaat te bouwen dat een uitgangssignaal levert J1 wanneer codes 000, 001 worden ontvangen op de ingang; bij de uitgang J2 met codes 010, 100, 110; bij de uitgang J3 met codes 011, 101, 110, 111. De codes die aan de ingang van het apparaat worden geleverd, kunnen worden beschouwd als adrescodes van single-bit ROM-cellen, van waaruit de eenheden die via het OR-element worden gelezen, worden toegevoerd aan een van de uitgangen Y ik. Laten we eens kijken naar de relatie tussen adressen en gegevensfuncties
(Tabel 4.13).
In afb. 4.43, A presenteert een ROM-circuit bestaande uit een adresdecoder logische elementen en opslagelementen in de vorm van diode-weerstandscircuits, waarvan de circuits jumpers bevatten. Variabelen X3, X2, X1 worden beschouwd als adrescodes van verschillende geheugencellen. Van de tafel Figuur 4.13 laat zien dat in de decoder op bepaalde adressen de bijbehorende uitgangsbussen worden aangeslagen, die moeten worden gecombineerd op een van de uitgangen van de schakeling: J1, J2, J3. OF-elementen waarmee signalen worden gegenereerd Y ik, vertegenwoordigen een onvolledige encoder.
Tabel 4.13
Decoder-waarheidstabel
| Adres | Ingangen | Uitgangen | ||||
| X3 | X2 | XI | J1 | J2 | J3 | |
| A0 A1 A2 A3 A4 A5 A6 A7 |
In afb. 4.43, B Hetzelfde ROM-circuit wordt gepresenteerd in de vorm van twee matrices. Matrix A1 is een complete lineaire decoder met acht uitgangen. Elke verticale lijn in A1 komt overeen met een EN-element met drie ingangen, die elk een van de combinaties van ingangsvariabelen implementeren X3, X2, X1. Matrix A2 is een onvolledige encoder.


Rijst. 4.43. ROM-matrix als basis van PLM
Elke horizontale lijn in A2 komt overeen met een OF-poort met acht ingangen. Over vorming noodzakelijke signalen bij elk van zijn ingangen zegt het punt op het snijpunt van de verticale lijn van de matrix A1 En horizontale lijn matrices A2.
De diagrammen getoond in Fig. 4.43 kan worden geïmplementeerd in de vorm van een combinatorisch circuit op een PLM (Fig. 4.44).

Rijst. 4.44. Combinatiecircuit op PLM
Vergelijking van twee circuits die dezelfde functies uitvoeren (zie Fig. 4.43, B en 4.44), zien we dat de schakeling geïmplementeerd in de vorm van een PLM eenvoudiger is. Matrix A1 in ROM is het een complete, hardgeprogrammeerde decoder; de PLM-matrix is minterms programmeerbaar voor functies. Apparatuurkosten worden meestal bepaald door het gebied van de halfgeleiderchip dat door het circuit wordt ingenomen. Op PLM gemaakte circuits bieden dus een grotere mate van integratie en breiden zich daardoor uit functionaliteit microschakelingen.
HOOFDSTUK 5.
COMPUTERHULPMIDDELEN VOOR INFORMATIEVERWERKING IN AUTOMATISERINGSSYSTEMEN
5.1. Microprocessors in textielautomatiseringssystemen
Digitale microschakelingen hebben nu hoge prestaties geleverd met een acceptabel stroomverbruik. De snelste van digitale chips hebben een schakelsnelheid in de orde van 3 - 5 ns. In deze microschakelingen is het stroomverbruik direct evenredig met de schakelsnelheid van de logische poorten in de microschakeling.
Een andere reden voor het wijdverbreide gebruik van microprocessors is dat een microprocessor een universele chip is die vrijwel elke functie kan vervullen. Universaliteit zorgt voor een grote vraag naar deze microschakelingen, wat massaproductie betekent. De kosten van microschakelingen zijn omgekeerd evenredig met de massaproductie ervan, dat wil zeggen dat microprocessors goedkope microschakelingen worden en daardoor de vraag nog meer vergroten.
Alle bovengenoemde eigenschappen komen voor een groot deel tot uiting in microcomputers met één chip of, zoals ze vaker worden genoemd vanwege hun toepassingsgebied: microcontrollers. Microcontrollers combineren alle componenten van een computer op één enkele chip: een microprocessor (vaak de microcontrollerkern genoemd), RAM, ROM, timers en I/O-poorten.
Wanneer naar complexe automatisering textielproductietechnologieën en de opkomst van middelen voor de implementatie ervan in de vorm van gespecialiseerde mic(MPCS), rees de vraag over multi-gerelateerde regulering van een aantal parameters. Dit vereiste het oplossen van de problemen van het identificeren van technologische processen, hun onderlinge relatie en controleerbaarheid volgens de door technologen voorgestelde parameters zoals gereguleerd. Met de hulp van MPSU kunnen de volgende hoofdtaken worden opgelost in de complexe automatisering van de textielproductie.
1. Informatie en meting, waardoor de verzameling van uitgebreide informatie wordt gewaarborgd; geluidsimmuniteit; noodzakelijke verwerking van statistische gegevens, softwarematige correctie van meetfouten, automatische diagnostiek en zelfkalibratie van het meetsysteem. Tegelijkertijd biedt de programmeerbare bedieningslogica van de MPSU flexibiliteit bij herconfiguratie en kunt u de functies van het systeem tijdens modernisering uitbreiden zonder noemenswaardige circuitwijzigingen.
2. Regulering van technologische parameters en werkingsmodi van apparatuur, waardoor de door technologen gereguleerde parameters kunnen worden gehandhaafd ingestelde waarde of verander ze om te voldoen aan optimalisatievoorwaarden in systemen van meervoudig verbonden regelgeving, tijdprestaties, energie en kwaliteitsindicatoren. De kwaliteit van de regeling wordt in ieder geval bepaald door de betrouwbaarheid van metingen en ontvangen informatie.
3. Controle van de bedieningsmodi van technologische apparatuur en robotica, voornamelijk geïmplementeerd in de vorm van automatische operators of automatische manipulatoren die bewerkingen uitvoeren, bijvoorbeeld het laden en lossen van vezelbalen, kettingrollen en weefbalken, het verwijderen en installeren van klossen op spoelen en spinmachines , het vullen van spinstations met cartridges, tape piecing en knopen, enz.
De coördinatie van de werking van alle bedieningselementen van de procesapparatuur, inclusief de regeling van signaalstromen in tijd en ruimte en de verwerking ervan, wordt uitgevoerd door een centraal besturingsapparaat. Moderne apparaten centrale besturingen zijn elektronisch en zijn onderverdeeld in universele besturingen die gebruik maken van microcomputers en gespecialiseerde besturingen die gebruik maken van microcontrollers, microprocessors en logische circuits.
Toepassing van het principe programma controle bij systemen automatische controle en het verzamelen van gegevens over de status van systemen in combinatie met microprocessors verhoogde hun functionaliteit aanzienlijk, zorgde voor grotere flexibiliteit, verminderde kosten en omvang, verhoogde betrouwbaarheid, weerstand tegen ongunstige omstandigheden omgeving en andere operationele kenmerken.
Microprocessors en daarop gebaseerde microcontrollers hebben een brede toepassing in de digitale wereld gevonden meetinstrumenten en systemen, die de invoer en uitvoer van gegevens, waarschuwingssignalen of opdrachten naar het display vereenvoudigden, evenals het automatisch schalen van deze parameters. Microprocessors kunnen zorgen voor zelftesten en zelfkalibratie, controle van de gegevensconsistentie, communicatie met een microcomputer of computergestuurde instrumenten, en automatische middeling van meetwaarden. Microprocessors en daarop gebaseerde microcontrollers beschikken echter over een kleiner volume aan standaardsoftware, een reeks randapparatuur en interfacemogelijkheden dan microcomputers.
Microprocessors hebben ook toepassing gevonden in terminals, microcomputernetwerken, berichtenschakelmodules, repeaters, opslagsystemen voor gegevensoverdracht, coderings- en decoderingsapparaten, draagbare systemen communicatie, beveiliging en modems.
Microprocessors worden gebruikt in microcomputersysteemeenheden, invoer-/uitvoercontrollers en andere randapparatuur. Met microcontrollers in randapparatuur kunt u veel taken aan de rand uitvoeren, waardoor u wordt ontlast CPU om andere taken uit te voeren.
Microprocessors, microcontrollers en microcomputers worden gebruikt in textielapparatuur: in datacontrolesystemen, kwaliteitscontrole-installaties, automatische weeg- en doseersystemen, besturing van units/machines, bepaling van de krulgraad, controllers die individuele handelingen aansturen, bijvoorbeeld spanning van garens, tapes, stoffen enz., sorteerapparaten, laad- en losapparaten, terminals en automatische diagnoseapparaten.
Opgemerkt moet worden dat bij het beheer technologische verwerkers textielindustrie betreft groot aantal instelbare parameters en de complexiteit van besturingsalgoritmen vereisen het gebruik van krachtige microcomputers. Er worden microprocessoren gebruikt gedistribueerde systemen, waarin algoritmen voor het beheer van objecten ter plaatse worden geïmplementeerd en gegevens worden voorbereid voor microcomputers, wat de betrouwbaarheid van systemen vergroot onder omstandigheden van industriële interferentie.
IN de nieuwste modellen microprocessoren besturingssysteem geheel of gedeeltelijk geïmplementeerd door hardware op basis van flash-geheugen, waardoor het proces van het beheer van industriële faciliteiten wordt geoptimaliseerd.
Sollicitatie
De DAC wordt gebruikt wanneer het nodig is om een signaal van een digitale weergave naar een analoge weergave om te zetten, bijvoorbeeld in cd-spelers (audio-cd).
DAC-typen
Meest voorkomende soorten elektronische DAC's:
- Pulsbreedtemodulator - eenvoudigste soort DAC. Een stabiele stroom- of spanningsbron wordt periodiek ingeschakeld gedurende een tijd die evenredig is aan de omgezette tijd digitale code Vervolgens wordt de resulterende pulsreeks gefilterd door een analoog laagdoorlaatfilter. Deze methode wordt vaak gebruikt om de snelheid van elektromotoren te regelen en wordt ook steeds populairder in hifi-audioapparatuur;
- Overbemonstering DAC, zoals delta-sigma DAC's, zijn gebaseerd op variabele pulsdichtheid. Met oversampling kunt u een DAC met een lagere bitdiepte gebruiken om een hogere bitdiepte van de uiteindelijke conversie te bereiken; Vaak wordt een delta-sigma DAC gebouwd op basis van een eenvoudige één-bit DAC, die vrijwel lineair is. De low-bit DAC ontvangt puls signaal Met pulsdichtheid gemoduleerd(met een constante pulsduur, maar met een variabele duty-cycle), gemaakt met behulp van negatieve feedback. Negatief feedback fungeert als een hoogdoorlaatfilter voor kwantiseringsruis.
- Weegtype DAC, waarin elk bit van het geconverteerde binaire code komt overeen met een weerstand of stroombron die is aangesloten op een gemeenschappelijk sommatiepunt. De bronstroom (geleidingsvermogen van de weerstand) is evenredig met het gewicht van de bit waarmee deze overeenkomt. Alle niet-nul bits van de code worden dus aan het gewicht toegevoegd. De weegmethode is een van de snelste, maar wordt gekenmerkt door lage nauwkeurigheid vanwege de behoefte aan een reeks van veel verschillende precisiebronnen of weerstanden en variabele impedantie. Om deze reden hebben weeg-DAC's een maximale breedte van acht bits;
- Ladder DAC(keten R-2R-circuit). In de R-2R-DAC worden waarden aangemaakt speciaal schema, bestaande uit weerstanden met weerstanden R En 2R, een matrix met constante impedantie genoemd, die twee soorten opnames heeft: gelijkstroommatrix en inverse spanningsmatrix. Het gebruik van identieke weerstanden kan de nauwkeurigheid aanzienlijk verbeteren in vergelijking met een conventionele weeg-DAC, omdat het relatief eenvoudig is om een reeks precisie-elementen met dezelfde parameters te produceren. Met DAC's van het R-2R-type kunt u de beperkingen op de bitdiepte verleggen. Met lasertrimmen van weerstanden op één substraat wordt een nauwkeurigheid van 20-22 bits bereikt. Het grootste deel van de conversietijd wordt besteed aan operationele versterker, dus dat moet hij hebben gedaan maximale prestaties. De snelheid van de DAC ligt in het bereik van microseconden en lager (dat wil zeggen nanoseconden);
Kenmerken
DAC's bevinden zich aan het begin van het analoge pad van elk systeem, dus de parameters van de DAC bepalen grotendeels de parameters van het hele systeem als geheel. De volgende zijn de meest belangrijke kenmerken DAC.
- Maximale bemonsteringssnelheid- de maximale frequentie waarop de DAC kan werken en het juiste resultaat aan de uitgang oplevert. Volgens de stelling van Nyquist-Shannon (ook bekend als de stelling van Kotelnikov), kan het correct reproduceren van een analoog signaal van digitale vorm Het is noodzakelijk dat de bemonsteringsfrequentie niet minder is dan tweemaal de maximale frequentie in het signaalspectrum. Om bijvoorbeeld het gehele voor mensen hoorbare audiofrequentiebereik, waarvan het spectrum zich uitstrekt tot 20 kHz, weer te geven, is het noodzakelijk dat het audiosignaal wordt bemonsterd met een frequentie van ten minste 40 kHz. De audio-cd-standaard stelt de bemonsteringsfrequentie in geluidssignaal 44,1 kHz; Om dit signaal te reproduceren heeft u een DAC nodig die op deze frequentie kan werken. Goedkope computergeluidskaarten hebben een samplingfrequentie van 48 kHz. Signalen die op andere frequenties zijn bemonsterd, worden opnieuw bemonsterd naar 48 kHz, waardoor de signaalkwaliteit gedeeltelijk verslechtert.
- Monotoon- DAC-eigenschap om te vergroten analoge uitgang signaal wanneer de invoercode toeneemt.
- THD+N(totale harmonische vervorming + ruis) - een maat voor de vervorming en ruis die door de DAC in het signaal wordt geïntroduceerd. Uitgedrukt als een percentage van het harmonische vermogen en de ruis in het uitgangssignaal. Belangrijke parameter voor DAC-toepassingen met een klein signaal.
- Dynamisch bereik- de verhouding tussen de grootste en kleinste signalen die de DAC kan weergeven, uitgedrukt in decibel. Deze parameter geassocieerd met bitdiepte en ruisdrempel.
- Statische kenmerken:
- DNL (differentiële niet-lineariteit) - karakteriseert hoeveel de analoge signaalincrement verkregen door het verhogen van de code met 1 minst significante bit (LSB) verschilt van de juiste waarde;
- INL (integrale niet-lineariteit) - karakteriseert hoeveel de overdrachtskarakteristiek van de DAC verschilt van de ideale. Het ideale kenmerk is strikt lineair; INL laat zien hoe ver de spanning aan de DAC-uitgang voor een bepaalde code afwijkt van de lineaire karakteristiek; uitgedrukt in minimumloon;
- verdienen;
- vooroordeel.
- Frequentiekarakteristieken:
- SNDR (signaal-ruisverhouding + vervorming) - karakteriseert in decibel de verhouding van het uitgangssignaalvermogen tot het totale vermogen van ruis en harmonische vervorming;
- HDi ( coëfficiënt ik harmonischen) - karakteriseert i-de relatie harmonischen tot fundamenteel;
- THD (harmonische vervormingsfactor) is de verhouding tussen het totale vermogen van alle harmonischen (behalve de eerste) en het vermogen van de eerste harmonische.
Zie ook
Literatuur
- Jean M. Rabai, Anantha Chandrakasan, Borivozh Nikolic. Digitale geïntegreerde schakelingen. Ontwerpmethodologie = Digitale geïntegreerde schakelingen. - 2e druk. - M.: Williams, 2007. - 912 d. - ISBN 0-13-090996-3
- Mingliang Liu. Het ontraadselen van circuits met geschakelde condensatoren. ISBN-0-75-067907-7.
- Phillip E. Allen, Douglas R. Holberg. CMOS analoog circuitontwerp. ISBN-0-19-511644-5.
Koppelingen
- Digitaal-naar-analoog converters (DAC's), theorie en werkingsprincipes op de Microelectronics Market-website
- Digitaal-naar-analoog-omzetters voor digitale signaalverwerkingstoepassingen
- INL/DNL-metingen voor snelle ADC's leggen uit hoe INL en DNL worden berekend
- Alexey Stakhov. Fibonacci Computer Deel 1, Deel 2, Deel 3 // PCweek.ru, 2002
- R-2R Ladder DAC uitgelegd bevat schema's
| Microcontrollers | |||||
|---|---|---|---|---|---|
| Architectuur |
| ||||
Digitaal-naar-analoog converters hebben statische en dynamische kenmerken.
Statische kenmerken van de DAC
Voornaamst statische kenmerken DAC's zijn:
· oplossing;
· niet-lineariteit;
· differentiële niet-lineariteit;
· eentonigheid;
· conversiefactor;
· absolute volledige fout;
· relatieve volledige schaalfout;
· nul-offset;
absolute fout
Oplossing – dit is de toename van U OUT bij het transformeren van aangrenzende waarden D j, d.w.z. die één minst significante eenheid (EMP) verschillen. Deze stap is de kwantiseringsstap. Voor binaire conversiecodes is de nominale waarde van de kwantiseringsstap gelijk
h = U PS /(2 N – 1),
waarbij U ПШ – nominaal maximum uitgangsspanning DAC (volledige spanning), N – DAC-bitdiepte. Hoe hoger de bitdiepte van de converter, hoe hoger de resolutie.
Volledige fout – het relatieve verschil tussen de reële en ideale waarden van de conversieschaallimiet bij afwezigheid van een nulpuntverschuiving, d.w.z.
Het is de multiplicatieve component van de totale fout. Soms aangegeven door het bijbehorende EMP-nummer.
Nul-offsetfout – de waarde van U OUT wanneer de DAC-ingangscode nul is. Het is een additief onderdeel van de totale fout. Meestal uitgedrukt in millivolt of als percentage van de volledige schaal:
Niet-lineariteit – maximale afwijking van de werkelijke conversiekarakteristiek U OUT (D) van de optimale (Fig. 5.2, regel 2). Optimale prestaties wordt empirisch op een zodanige manier gevonden dat de waarde van de niet-lineariteitsfout wordt geminimaliseerd. Niet-lineariteit wordt meestal gedefinieerd in termen van relatieve eenheden, maar wordt ook vermeld in de referentiegegevens in het EMR. Voor de kenmerken getoond in Fig. 5.2,
Differentiële niet-lineariteit – de maximale verandering (rekening houdend met het teken) van de afwijking van de werkelijke transformatiekarakteristiek U OUT (D) van de optimale bij het verplaatsen van de ene waarde van de invoercode naar een andere aangrenzende waarde. Meestal gedefinieerd in relatieve eenheden of in EMP. Voor de kenmerken getoond in Fig. 5.2,
Monotoon conversiekarakteristieken - verhoging (verlaging) van de DAC-uitgangsspanning (U OUT) met een verhoging (verlaging) van de ingangscode D. Als de differentiële niet-lineariteit groter is dan de relatieve kwantiseringsstap h/U PN, dan is de omzetterkarakteristiek niet-monotoon.
De temperatuurinstabiliteit van de DAC wordt gekenmerkt door temperatuur coëfficiënten fouten op volledige schaal en nul-offsetfouten.
Fouten op volledige schaal en nulpuntverschuiving kunnen worden gecorrigeerd door kalibratie (afstemming). Niet-lineariteitsfouten met eenvoudige middelen kan niet worden geëlimineerd.
Dynamische kenmerken van de DAC
NAAR dynamische kenmerken ben DAC's omvatten bezinkingstijd en conversietijd.
Met een opeenvolgende toename van de waarden van het digitale ingangssignaal D(t) van 0 naar (2 N – 1) via de minst significante eenheid, vormt het uitgangssignaal U OUT (t) een getrapte curve. Deze afhankelijkheid wordt gewoonlijk de DAC-conversiekarakteristiek genoemd. Bij afwezigheid van hardwarefouten bevinden de middelpunten van de stappen zich op de ideale rechte lijn 1 (zie figuur 5.2), die overeenkomt met de ideale conversiekarakteristiek. Echte kenmerken transformatie kan aanzienlijk verschillen van perfecte maat en de vorm van de treden, evenals hun locatie op het coördinatenvlak. Om deze verschillen te kwantificeren, is er een hele serie parameters.
De dynamische parameters van de DAC worden bepaald door de verandering in het uitgangssignaal wanneer abrupte verandering invoercode, meestal van de waarde “allemaal nullen” tot “allemaal enen” (Fig. 5.3).
Tijd regelen
– tijdsinterval vanaf het moment van verraad
invoercode (Fig. 5.3, t = 0) tot het moment waarop laatste keer gelijkheid geldt:
|U UIT – U ПШ | = d/2,
waarbij d/2 gewoonlijk overeenkomt met EMP.
Zwenksnelheid – maximale snelheid veranderingen in U OUT (t) tijdens het transiënte proces. Gedefinieerd als de toenameratio D U OUT tot het tijdstip Dt waarop deze verhoging heeft plaatsgevonden. Meestal aangegeven in technische specificaties DAC met spanningsuitgangssignaal. Voor digitaal-naar-analoog-omzetters met stroomuitgang hangt deze parameter grotendeels af van het type uitgangs-op-amp.
Voor DAC's met spworden vaak de eenheidsversterkingsfrequentie en de vermogensbandbreedte gespecificeerd, die grotendeels worden bepaald door de eigenschappen van de uitgangsversterker.
Figuur 5.4 toont twee linearisatiemethoden, waaruit volgt dat de linearisatiemethode moet worden verkregen minimale waarde Dl getoond in Fig. Met 5.4, b kunt u de fout Dl met de helft verminderen in vergelijking met de linearisatiemethode op grenspunten (Fig. 5.4, a).
Voor digitaal-analoog-omzetters met n binaire cijfers komt in het ideale geval (bij afwezigheid van conversiefouten) de analoge uitgang U OUT overeen met de ingang binair getal als volgt:
U UIT = U OP (a 1 2 -1 + a 2 2 -2 +…+ a n 2 -n),
waarbij U OP de referentiespanning van de DAC is (van de ingebouwde of externe bron).
Omdat ∑ 2 -i = 1 – 2 -n, en alle bits ingeschakeld, is de uitgangsspanning van de DAC gelijk aan:
U UIT (a 1 …a n) = U OP (1 – 2 -n) = (U OP /2 n) (2 n – 1) = D (2 n – 1) = U PS,
waarbij UPN de volledige spanning is.
Wanneer dus alle bits zijn ingeschakeld, verschilt de uitgangsspanning van de digitaal-naar-analoog-omzetter, die in dit geval UPN vormt, van de waarde van de referentiespanning (UOP) met de waarde van het minst significante cijfer van de omzetter (D), gedefinieerd als
D = U OP /2 n.
Wanneer een i-de bit wordt ingeschakeld, wordt de uitgangsspanning van de DAC bepaald op basis van de relatie:
U UIT /a ik = U OP 2 -i .
Een digitaal-naar-analoog omzetter zet de digitale binaire code Q 4 Q 3 Q 2 Q 1 om in een analoge waarde, meestal spanning U OUT. of stroom I UIT. Elk bit van de binaire code heeft een bepaald gewicht van het i-de bit dat tweemaal zo groot is als het gewicht van het (i-1)de bit. De werking van de DAC kan worden beschreven met de volgende formule:
U UIT = e (Q 1 1 + Q 2 2 + Q 3 4 + Q 4 8 +…),
waarbij e de spanning is die overeenkomt met het gewicht van het minst significante cijfer, is Qi de waarde van het i-de cijfer van de binaire code (0 of 1).
Het getal 1001 komt bijvoorbeeld overeen met:
U UIT = e (1· 1 + 0 · 2 + 0 · 4 + 1 · = 9 · e,
en het nummer 1100 komt overeen
U UIT = e (0· 1 + 0 · 2 + 1 · 4 + 1 · = 12 · e.